[첨단 헬로티]
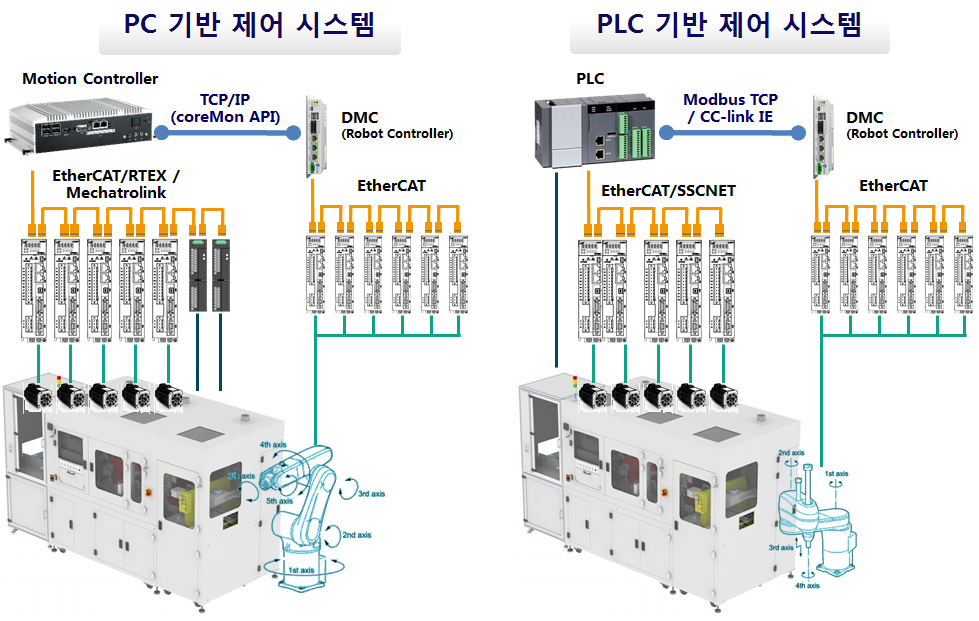
반도체/디스플레이 등 대량 생산 제조 라인은 공정 효율과 생산 속도 개선 요구를 끊임없이 받고 있으며 이로 인해 대다수 장비 제조사는 핸들링 로봇을 장비 안으로 넣고자 하는 시도를 하고 있다.
이미 독일, 일본 등의 해외 업체들은 인더스트리 4.0과 스마트 팩토리의 확산에 따라 다양한 방식으로 장비에 로봇을 내장하거나 연계하여 활용 하고 있다.

장비 제조사의 로봇 사용에 대한 추세를 살펴보면, 과거 에는 핸들링 공정에 직교방식의 로봇을 주로 사용했으 나, 단순한 로봇 모션으로는 복잡한 공정에 대응이 어렵고 공간과 속도의 제약 등의 문제 때문에 근래에는 초고속 SCARA 또는 수직 다관절 로봇의 도입이 적극 추진 되고 있다. 산업용 로봇 모션 제어기 전문 기업인 다인큐브는 급격히 대두되고 있는 장비와 로봇의 통합 솔루션에 대한 고객의 니즈를 충족하고 생산 효율과 비용 절감 그리고 전체 시스템의 최적화를 위한 솔루션인 장비용 로봇 제어기 ‘DMC-coreCon’을 출시하고 국내외 메이저 기업들에 본격 양산 공급을 하고 있다.
자동화 장비+스마트 핸들링 로봇 통합 제어 솔루션인 DMC-coreCon은 많은 장비 제조사가 핸들링 로봇을 장비와 연동하고자 했으나 여러 가지 기술적인, 환경적인 huddle 로 인해 겪고 있는 문제를 기구와 SW의 간단한 세팅만으로 해결하였는데, 본 기고에서는 기존의 문제점과 DMC-coreCon이 제시하는 해결 방안에 대해 살펴보도록 하겠다(표 1).
표 1 장비용 로봇 제어기(DMC-coreCon) 적용 사례 및 어드밴티지(Advantage)
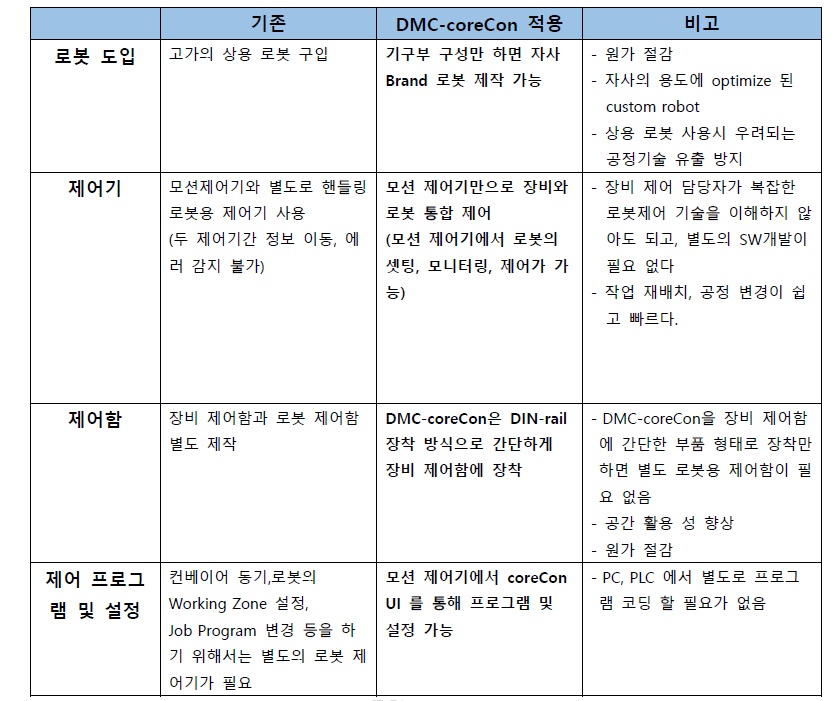
표 2. 모션제어기와 장비용 로봇제어기간 인터페이스 기능 지원 목록
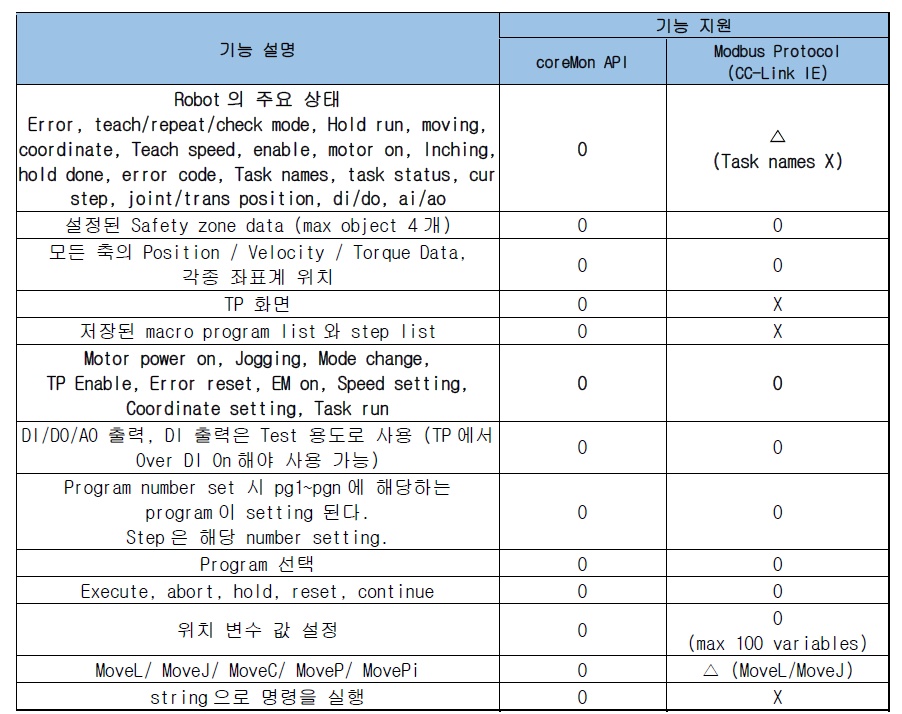
본고의 도입부에서 소개 하였듯이 모션 제어기 사용자는 간단한 제어 모듈 장착과 세팅만으로 모션 제어기로 자동화 장비+핸들링 로봇을 통합 제어할 수 있다. 구체적으로 모션 제어기에서 로봇에 대한 어떠한 정보를 가져오고 정보의 기반 하에 로봇을 세팅하고 제어하는 구체적인 방법에 대한 설명을 표 2를 통해 구체적으로 제시하 고자 한다.
산업용 로봇 제어기 전문 기업 다인 큐브가 제공하는 통합 제어 솔루션과 전체적인 제품에 대한 구체적인 소개를 하고자 한다.
로봇 모션 제어기 ‘coreCon S/W’
로봇 모션 제어기의 S/W 알고리즘을 일컫는 코어콘(coreCon)은 T/P 일체형과 독립형 타입으로 나뉘어 공급된다(표 3). 고성능 ARM 코어 텍스 A9 프로세서에 실시간 운영체 제(Xenomai) 및 로봇 제어 소프트 웨어인 통합 코어콘을 탑재하였으 며, 이더캣 마스터(EtherCAT Master) 플랫폼을 내장하여 다양한 이더캣 서보 모터 드라이버 및 I/O 등을 실시간으로 제어할 수 있다.
표 3. 로봇 모션 제어기 coreCon S/W 사양표
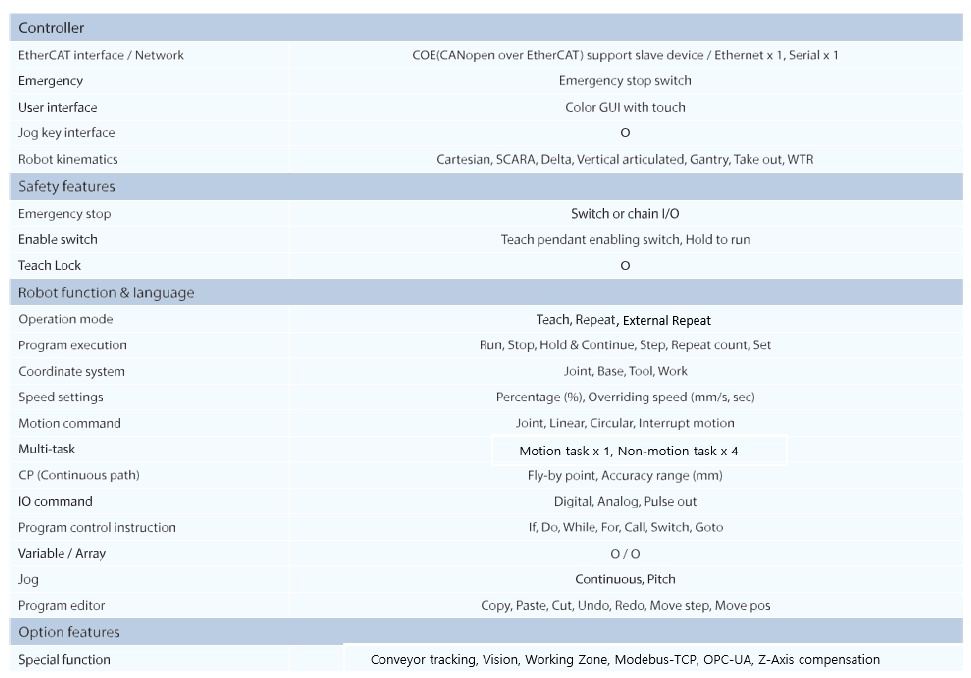
또한 모션 제어 소프트웨어인 코어 콘은 다양한 로봇(직교, 스카라, 병렬, 수직다관절, 취출, WTR)을 간단한 설정과 조작만으로 손쉽게 제어할 수 있으며, ABB, 화낙, 아스카와 등에서 지원하는 유사한 조작 방법과 로봇 전용 언어를 사용함으로써 전문 프로그램 개발자가 아니라도 간단한 교육만으로 쉽게 사용할수 있다.
이번에 출시된 코어콘 4.0 버전에는 협동 로봇 제어 알고리즘 탑재, 정전 복구 기능, 폴트 톨러런스(fault tolerance) 기능, 다이아그노스틱(diagnostic) 기능을 통한 원격 감시 및 품질 안정화 강화, 모션 프로파일 기능 고도화를 통한 고급 모션 기능과 진동 제어 기능 등을 추가함으로써 산업용 로봇에 최적화된 모션 제어기라고할 수 있다.
독립형 로봇 모션 제어기 ‘DMC-coreCon’
그림 2의 독립형 로봇 모션 제어기 DMC-coreCon은 임베디드(Embedded) ARM 기반, Linux, Xenomai 탑재로 경량, 소형, 저전력 등 산업용에 최적화 되어 있고 EtherCAT Master 통신 기반으로 다양한 드라이버와 호환이 가능하고 6축 수직 다관절 로봇을 비롯하여 다양한 로봇 타입의 모션 제어가 가능한 제품이다(표 4).
표 4. DMC-coreCon 스펙 및 사양
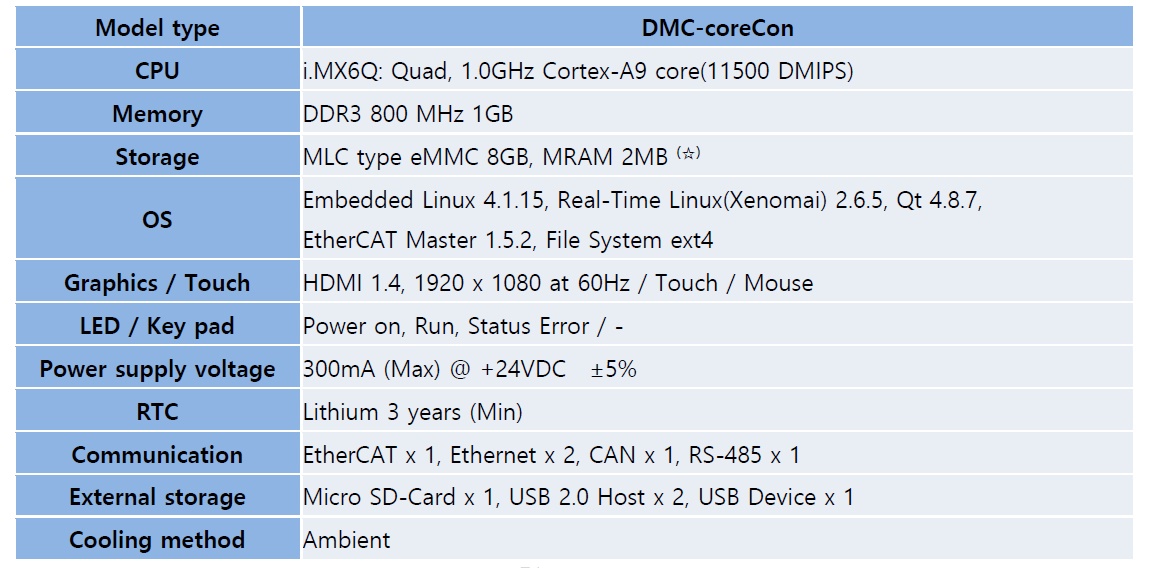
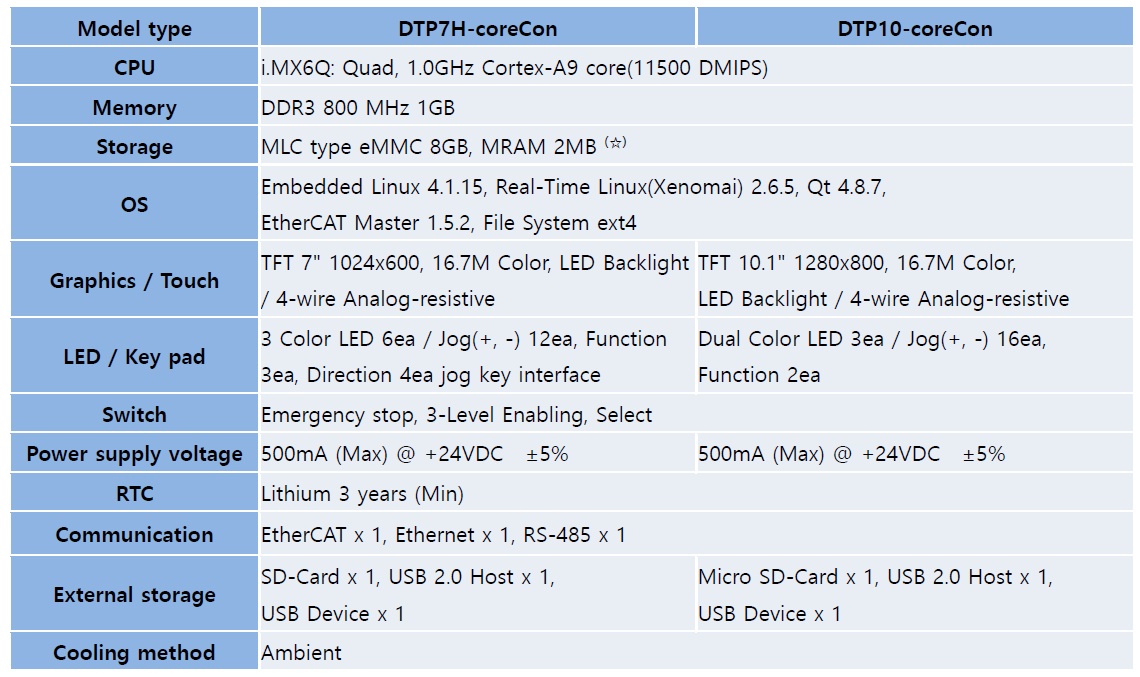
그림 3의 제품은 로봇 모션 제어기를 교시 펜던트 (Teach Pendant)에 일체화 하여 별도의 제어기와 T/P 를 구성할 필요 없이 올인원 타입(All-in-one Type)이 다(표 5).

그림 3. T/P 일체형 로봇 모션 제어기 DTP7H-coreCon & DTP10-coreCon
표 5. DTP7H-coreCon & DTP10-coreCon 스펙 및 사양
PC 환경의 로봇 시뮬레이션 S/W ‘coreSim’
본 S / W는 P C환경에서, S T L / VRML 파일을 이용하여 다양한 환경의 시뮬레이션이 가능한 로봇 시뮬레이션 소프트웨어이다(그림 4).
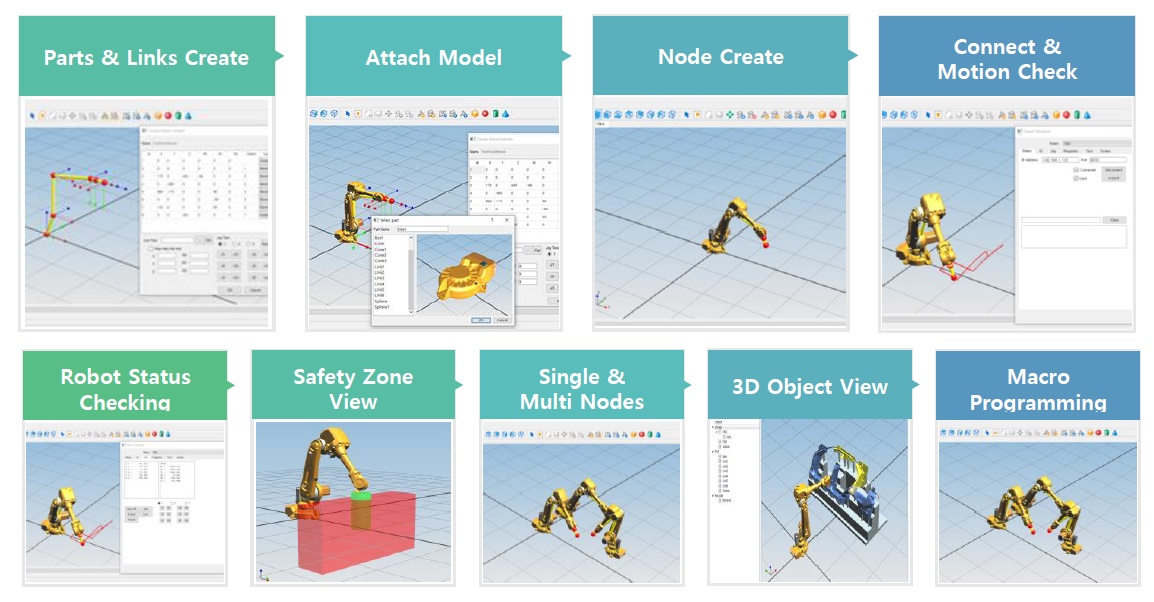
그림 4. coreSim을 사용하여 세팅 및 적용한 실제 사진
S/W 개발환경을 제공 ‘coreDev’
coreDev는 모션 제어기 ‘coreCon’ 에 사용자가 원하는 사용자환경 (User interface) / 로봇언어 / 모션(Motion) / 컨트롤 알고리즘 (Control Algorithms)을 플러그인(plug-in) 형태로 쉽게 개발하도록 S/W 및 개발환경 일체를 제공한다(그림 5).
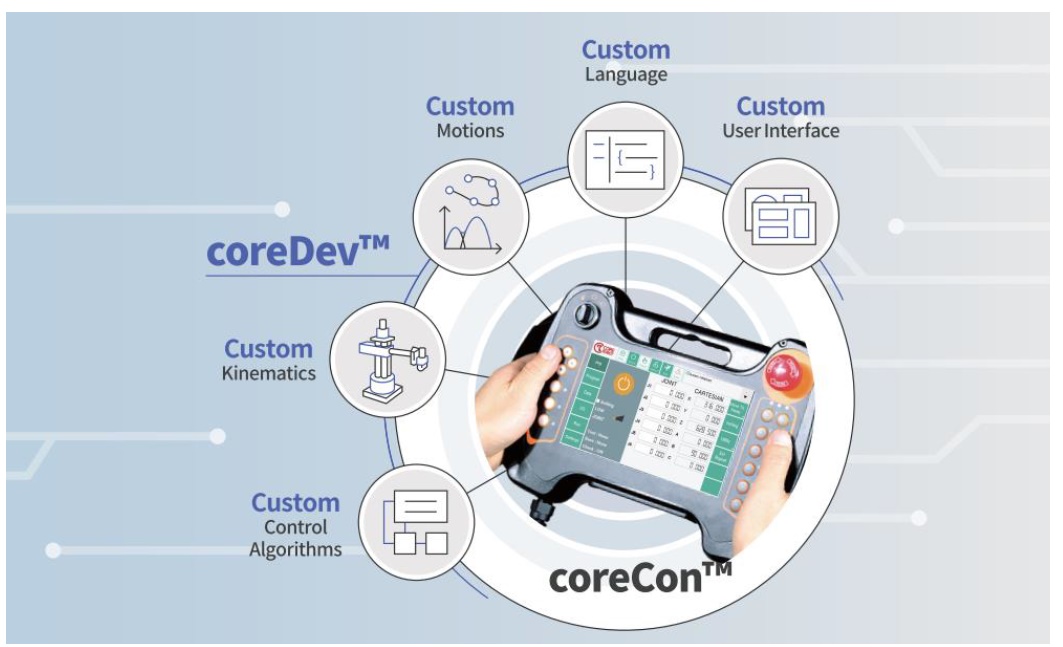
그림 5. coreDev 소개
또한 coreCon에서 지원하는 교시(Teaching), 프로그 래밍 언어(Job Programming Languages), 모션 제어(Motion Control), 모니터링 및 셋팅 기능과 함께 사용자 로봇의 기구학(Kinematics) 및 모션(Motion), 제어(Control) 알고리즘과 고객 사용자환경(Custom UI) 개발을 위한 일체의사용자 S/W 개발 환경을 제공 한다(그림 5).
coreDev는 플러그인(plug-in) 형태의 실시간 태스크 동작 구조로 설계되어 있으며 coreCon의 빌트인 기능과 연동하여 사용자의 전문적인 응용 개발을 가능하게 한다.
더불어, coreCon API가 제공하는 정보(예, 조인트 위치/ 속도/가속도, 엔드이펙터(End-Effector) 위치/방향, 모터의 토크 피드백, 제어 파라미터 등)를 이용하여 사용자 알고리즘의 로봇 적용 및 개발을 효과적으로 할 수 있다.
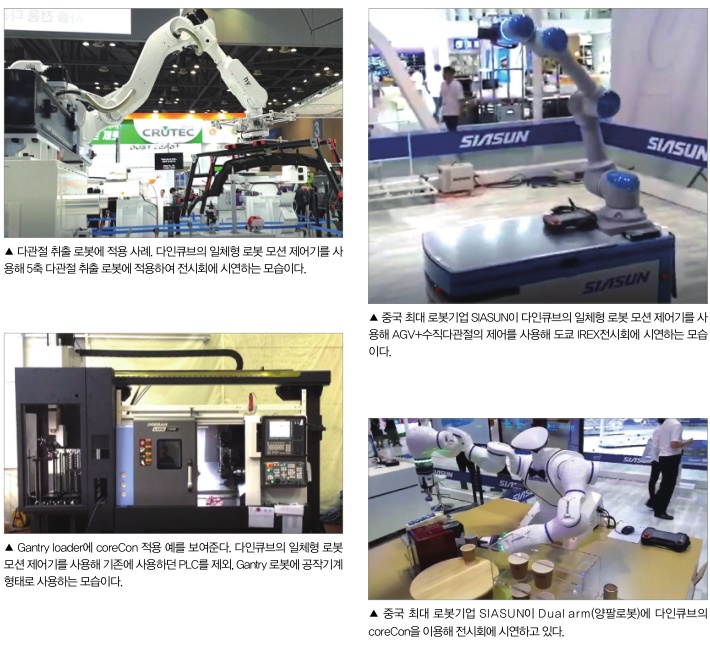
그림 6. 로봇 모션 제어기 적용 사례. 다인큐브의 제품을 실제 적용한 사례를 보여주고 있다.
맺은말
산업용 로봇 모션 제어기 전문 기업인 다인큐브는 반도 체, 디스플레이 등 자동화 장비+핸들링 로봇을 통합 제어 하는 솔루션인 DMC-coreCon 공급을 통해 반도체, 디스 플레이 등 장비 업체에 제품을 공급하고 국내외의 여러 장비용 모션 제어기 공급사와도 전방위적인 협력 관계 구축과 함께 세계 시장 공략에도 박차를 가하고 있다.
글 / 구성모 다인큐브 상무