



[첨단 헬로티]
필드버스는 자동화 기술의 통합 구성요소가 되었다. 그동안 필드버스 기술은 테스트와 검증을 거쳤고, 이제는 널리 장착되었다. PC 기반의 제어 시스템을 광범위한 스케일로 애플리케이션 할 수 있게 만든 것이 바로 필드버스 기술이다. 산업용 컴퓨터 CPU의 성능이 빠르게 성장하는 동안 전형적인 필드버스 시스템은 병목 현상이라는 제어 시스템이 도달할 수 있는 성능의 한계점을 발견했다.
네트워킹 컨트롤러에서 필드버스 시스템 상위인 이더넷(Ethernet)은 이미 최신 기술을 가지고 있다. 또한, 이더넷은 필드버스의 기술 중 하나인 드라이브나 입/출력 레벨에서 애플리케이션 하는 것을 대체할 수 있는 기술이며, 특히 이더캣은 높은 실시간 성능, 소량의 데이터에 적합하여 가격 대비 효율성이 높을 것으로 떠오르고 있다. 이와 동시에 전체 제어 시스템의 수직 계층적 구조의 맨 하부 단인 입/출력 레벨에서 인터넷 기술을 가능하게 한다.

EtherCAT의 특징
1.동작원리
각 노드는 프레임이 이동하는 동안 자신에게 전달된 데이터를 읽고, 그리고 자신의 데이터를 모두 프레임에 기록한다. 이때 프레임은 하드웨어 전달 지연시간(ns)에 의해서만 지연이 되고 이는 대역폭(Bandwidth) 이용률을 높일 수 있다.
2. 사용자의 편리성
노드별 어드레스가 자동 설정이 되기 때문에 스위치가 필요 없으며, MAC 또는 IP 어드레스의 복잡한 조작을 하지 않아도 된다(네트워크 설정 불필요).
3. 네트워크 성능
현재 가장 빠른 산업용 이더넷 기술이며, 분산클락에 기반한 고정밀 동기화가 가능하다. 양방향 전송(FULLDuplex) 특성을 충분히 활용하여 100Mbs보다 큰 효과적인 데이터 속도를 지원한다.
4. 유연한 토폴로지
이더캣은 어떠한 토폴로지도 지원한다. 캐스캐이드 방식 스위치나 허브의 개수에 대한 수적 제약이 없어 버스 또는 어떤 토폴로지 구조의 이더넷에도 사용이 가능하다.
(65,535개 디바이스 연결 가능 / 라인, 버스, 트리, 스타 또는 조합). 이더캣에서 이용하는 고속 이더넷 방식의 물리적 연결은 두 개의 디바이스 간 최대 거리를 100M까지 허용하며, 더 먼 거리는 광섬유케이블로도 가능하다.
5. 저비용, 증명된 기술
별도 스위치나 허브가 필요 없으며, 범용 UTP케이블로 사용이 가능하여 비용면에서 절감이 된다. 전 세계적으로 광범위한 애플리케이션에 적용되고 있으며, 많은 임베디드 시스템뿐만 아니라 장비제어, 의료장비, 자동차 제조, 휴대용 장비 등에도 사용된다.
6. 다용도
이더캣의 최대 장점이라 할 수 있다. 중앙 집중 시스템 및 분산 시스템 구조에 모두 적합하며, Master~Slave, Master~Master, Slave~Slave 통신 지원과 하위의 필드버스들도 통합이 가능하다. 누구나 자유롭게, 호환 가능한 형태로 그 기술을 사용 가능한 개방형 기술이다.
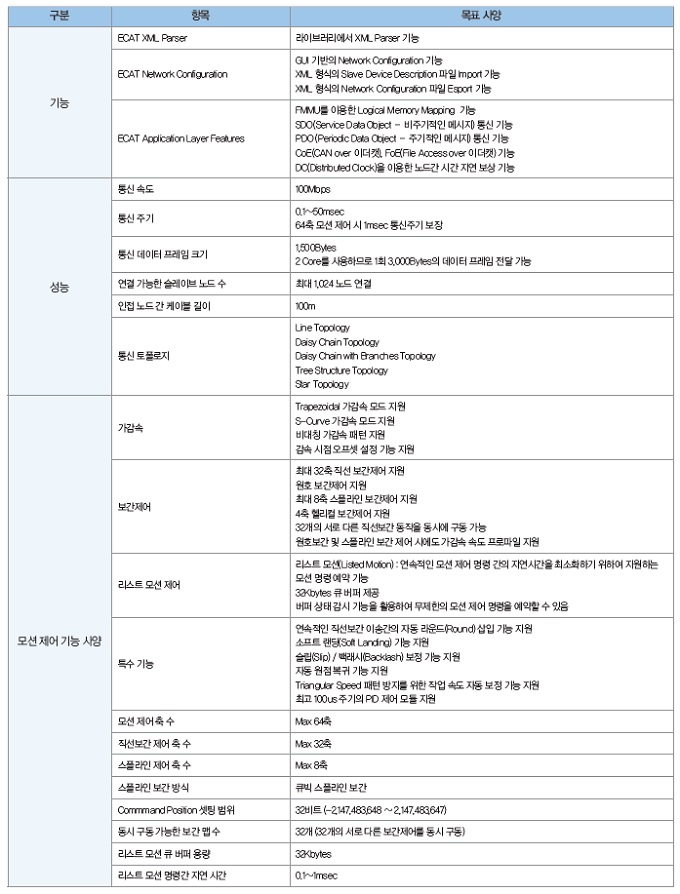
표 1 COMI-EtherCAT 기능 및 성능
COMI-EtherCAT의 개발 배경
장비업체, 서보업체와의 기술 제휴를 통한 철저한 사전 검토 및 검증으로 사용자가 필요로 하는 제품의 실리성과 기존 모션네트워크 및 이더캣 제품의 장단점을 분석하여 장점은 살리고 단점은 보완했다.
산업용 통신네트워크 기반 제어솔루션 비중이 확대되고, 장비의 고속 고정밀화, 가격 경쟁력 확보를 위한 원가절감 즉, 고효율 저비용의 제어솔루션이 필요함에 따라 새로운 신기술 모션 제어 솔루션의 필요성이 대두되었다.
커미조아 EtherCAT Master Board 특장점
1. 안정성
보드에 내장된 고성능 임베디드 프로세서가 PC와 독립적으로 동작하기 때문에, 예상할 수 없는 PC의 오차가 발생하는 경우에도 통신 네트워크의 안정성을 확보할 수 있다.
또한, 제어와 관련된 모든 처리를 프로세서가 수행하기 때문에, PC의 프로세서 부담이 매우 낮고, PC의 안정성을 향상할 수 있다. 프로세서 전용 BIOS를 적용하여, 프로세서의 TASK를 효율적으로 관리함으로써 안정성이 높다.
2. 고성능 및 유저 편의성
고성능 프로세서(1GHZ Dual Core or Quad Core)를 적용하여, 고속 데이터 연산이 가능하며, 다양한 모션 구동 알고리즘을 지원한다. 다양하고 편리한 SDK라이브러리와 C, C++, VB, Delphi 등의 고급 프로그래밍 언어를 지원하여 보다 유연하게 애플리케이션을 구성할 수 있다.
3. 강력한 모션 컨트롤 기능
다양한 모션 제어(위치, 속도, 토크제어 모두 지원) 라이브러리를 기본 제공한다. 임베디드 프로세서 내에 고급 모션 알고리즘을 내장하여, 애플리케이션에서 구현할 수없는 고급 모션 제어 기능을 구현할 수 있으며, 임베디드 프로그램을 사용자가 직접 구성할 수 있는 소프트웨어 환경을 제공함으로써, 사용자만의 독특한 제어 기능을 편리하게 구현할 수 있다.
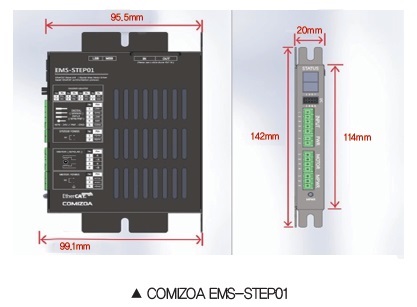
2019년 EtherCAT STEP Driver 출시
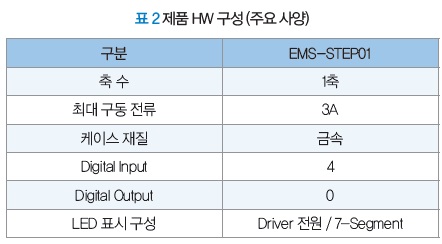
EMS-STEP01은 커미조아의 새로운 EtherCAT 개방 루프 스테퍼 드라이버로, 커미조아는 10여 년간 쌓아온 이더넷 통신 제어 기술력을 기반으로 개발되었다.
1. 스텝분주비
일반적인 모터의 스텝각에서 좀 더 세밀하게 나누어 한 모터의 동작을 정밀제어 가능하게 해주며 기본 스텝 각도인 Full-Step에서 최대 256분의 1 스텝각을 지원한다.
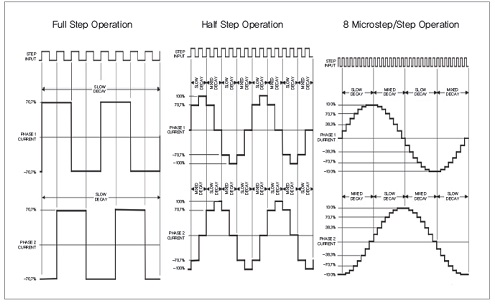
▲ 스텝분주비
2. Torque Improvement (모터 전류 설정)
모터의 구동 및 정지 상태일 때 모터에 인가되는 전류의 설정을 지원하여 동작상태 일 때 전류를 증가하여 높은 토크의 특성과 대기상태에서의 발열을 줄일 수 있으며, 정지상태 일 때 전류를 감소하여 대기상태에서의 발열을 줄일 수 있다.
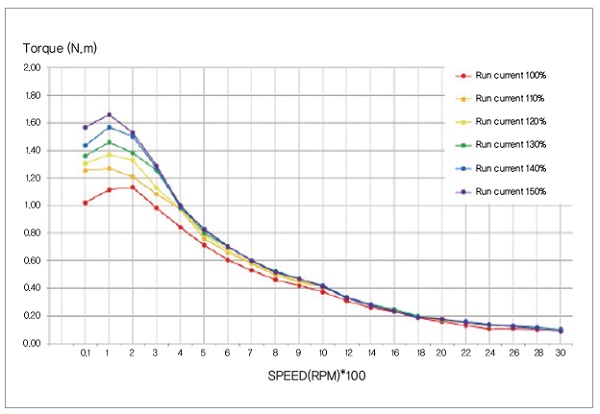
▲ 토크 상태와 모터 대기 상태에서의 발열
3. 다양한 보호 기능 알람 출력
드라이버 현재 상태를 전면에 있는 7-Segment를 통해 사용자에게 전달하고, 일반 상태일 경우 로터리 스위치에 설정된 Address값이 출력된다. 드라이버 오류 발생 시 발생된 알람코드를 출력하여 사용자의 편의를 향상시켰다.










































