[첨단 헬로티]
현재 부드러운 구조와 소프트 액추에이터의 연구에 의해 유연한 움직임을 실현하는 소프트 로봇의 개발이 진전되고 있다. 유연한 움직임은 환경에 대해 높은 적합성을 나타내기 때문에 사람과 기계가 위화감 없이 공존할 수 있는 기술을 실현할 가능성이 있다.
필자 등은 기계를 구성하는 가장 기본적인 부품의 하나인 모터에 주목했다. 그래서 그림 1에 나타낸 부드럽게 변형 가능한 모터를 실현할 수 있다면, 지금까지 없는 응용 전개를 기대할 수 있다고 생각했다.


필자 등의 주안점은 지금까지의 기계 기술과 부드러움의 융합이다. 회전 운동과 소프트 머티리얼을 조합할 수 있다면, 환경에 유연하게 적응하는 새로운 로봇이나 기계를 창조할 수 있는 가능성이 있다. 필자 등이 목표로 하는 부드럽게 변형 가능한 모터는 회전과 굴곡을 동시에 조작할 수 있기 때문에 문어의 다리나 뱀의 몸과 같은 유연한 움직임을 실현할 수 있다. 또한, 타이어․프로펠러를 이용한 이동, 굴삭기․연마기를 이용한 가공 등 기존의 기계 기능도 가지고 있다. 즉, 기계와 생물의 특징을 겸비한 모터이다.
유전 엘라스토머 액추에이터
유전 엘라스토머 액추에이터(Dielectric Elastomer Actuator : DEA)는 박막 형상의 정전형 소프트 액추에이터이다. DEA는 중량당 에너지 밀도가 높고, 소비전력이 작은 특징을 가지고 있다. 또한, DEA는 커패시터이기 때문에 엘라스토머의 안팎에 유연한 전극을 도포하는 공정만으로 형성 가능하며, 매우 심플한 구조이다(그림 2).
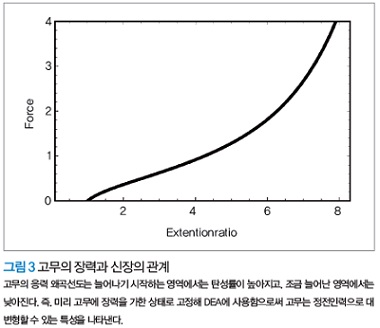
필자 등은 최근 엘라스토머에 직접 카본 나노 튜브를 솔로 도포하는 방법을 제안, 전체의 투명성이 높고 133%의 면적 변형을 출력할 수 DEA를 실현했다. 일반적으로 고무의 장력과 신장의 관계는 그림 3과 같이 된다. 신장이 작은 영역보다, 어느 정도의 신장을 준 상태의 쪽이 고무의 탄성률은 낮아진다. 이 비선형의 특성에 의해 DEA의 역학적 안정성과 고무의 절연 파괴강도의 관계로부터 최종적인 DEA의 성능이 결정된다. 고무에 전치왜곡을 가함으로써 역학적인 안정성은 향상되며, 또한 대변형이 가능해진다.
유연 전극에 전압을 인가하면, 전극 사이에 정전인력이 발생해 엘라스토머가 전극면과 수평 방향으로 신장한다. 또한 변형 후에 전극 사이의 전위를 제거하면 엘라스토머에 축적된 탄성 에너지에 의해 원래의 형상으로 되돌아간다.
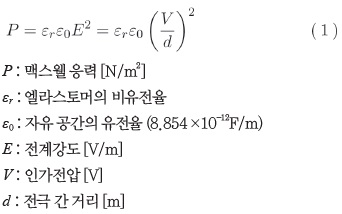
전극 사이에 생기는 압력은 식(1)에 의해 나타냈다. 엘라스토머에 300%의 전치왜곡을 가한 아크릴성의 고무 재료를 사용한 경우, 2kV의 전압으로 약 133%의 면적 변형이 생긴다.
Deformable Motor
1. DEA Motor
부드럽게 변형 가능한 모터를 실현하기 위해 DEA를 이용한 모터의 개발에 착수했다. 선행 연구에서는 DEA의 평면적인 변형을 회전 운동으로 변환해 적층함으로써 토크를 크게 하는 적층형 모터가 소개되어 있다. 선행 연구의 모터는 2.91mNm/Wg로 중량당 에너지 밀도․소비전력 효율이 매우 좋은 것을 나타내고 있었다.
필자 등은 기존 연구를 참고로 DEA Motor를 개발했다(그림 4). DEA Motor의 구동에는 4개의 DEA에 위상차 명령을 주고 변형시킬 필요가 있다. 따라서 고전압을 여러 개의 포트에서 출력하는 회로가 필요했다. 필자 등은 시판의 승압장치와 고전압 스위칭 소자를 이용해 손바닥 크기의 콤팩트한 회로를 설계했다.

2. Deformable Motor
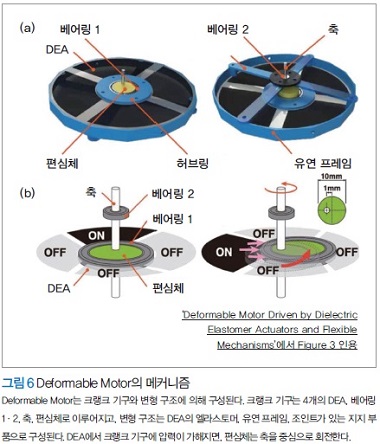
부드럽게 변형 가능한 모터의 실현을 위해서는 굴곡 시에 모터의 단면이 타원 변형해도 내부 구조가 유지되고 회전을 계속하는 구조가 필요하다. 필자 등은 외력에 의해 변형되어도 계속 회전하는 Deformable Motor를 개발했다. 그림 5(a)는 Deformable Motor의 원형, 그림 5(b)는 변형 상태를 나타낸다. 회전 시의 각 DEA의 동작은 고속 편광 카메라를 이용한 응력 가시화 실험에 의해 확인하고 있다.
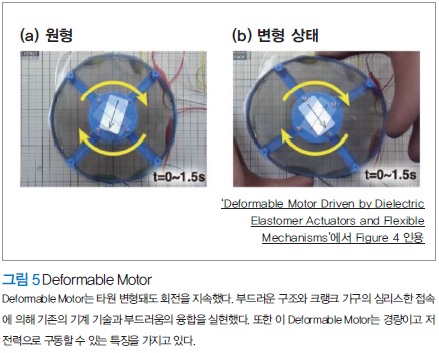
그림 6은 Deformable Motor의 내부 구조 및 회전의 원리를 나타낸다. Deformable Motor는 크랭크 기구와 변형 구조에 의해 구성된다. 그림 6(a)에 나타냈듯이 크랭크 기구는 2개의 베어링, 편심체, 축으로 구성된다. 또한, 변형 구조는 DEA의 엘라스토머, 유연 프레임, 조인트붙이 지지 부품으로 구성된다. DEA에서 크랭크 기구에 압축력이 가해지면, 그림 6(b)와 같이 편심체가 축을 중심으로 이동하고 회전 운동이 생긴다. 모터의 토크․회전 속도를 결정하는 편심체의 크랭크 반경은 1mm로 했다.
Deformable Motor의 성능
1. Deformable Motor의 변형 정의
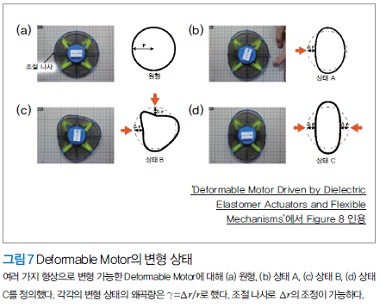
Deformable Motor는 변형하면, 내부 구조에 상태 변화가 생기고 회전 성능이 변화한다. 따라서 Deformable Motor의 3종류 형상에 대해 변형에 동반하는 성능 변화의 조사를 실시했다. 그림 7에 모터의 원형과 3종의 변형 상태 A, B, C를 나타냈다. 임의의 변형을 주기 때문에 모터의 변형을 조절하는 툴을 조합, 프레임에 압력을 가할 수 있게 했다. 변형의 정의는 원형의 반경을 r, 변형 상태의 반경 변형량을 Δr으로 하고, 변형 왜곡률을 Г=Δr/r로 나타낸다.
2. Deformable Motor의 성능
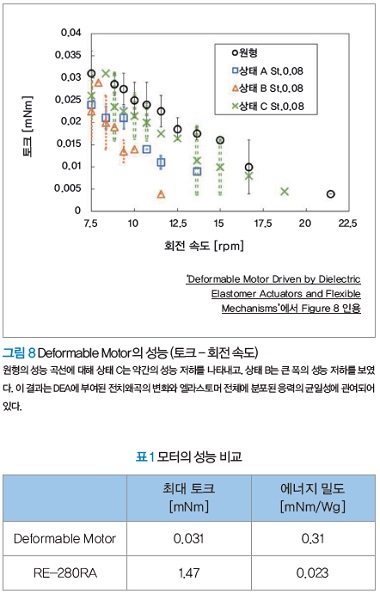
Deformable Motor를 토크-회전 속도의 성능 곡선에 의해 평가했다. 그림 8은 원형과 3개의 변형 상태(반경 왜곡 Г=0.08)에 대한 성능을 나타내고 있다.
Deformable Motor의 회전 성능은 원형이 가장 높은 회전 성능을 나타냈다. 그 최대 토크는 0.031mNm, 최대 회전 속도는 21.4rpm이었다. 또한 변형 상태에서는 높은 성능 순으로, 상태 C→상태 A→상태 B였다. 성능 차이의 원인은 변형에 의해 엘라스토머의 전치왜곡이 변화했기 때문이다. 전치왜곡이 불충분해진 DEA는 역학적으로 불안정해지고, 신축량이 감소했다고 생각된다. 신축률이 낮은 DEA가 이웃하는 상태 B는 가장 낮은 성능이다. 예비 실험에서는 상태 C의 대변형 시(변형 왜곡 Г=0.15)에 모터가 회전하는 것을 확인했다.
3. 성능 비교
Deformable Motor와 일반적인 자기식 모터인 RE-280RA의 회전 성능에 대해 고찰한다. 표 1에 Deformable Motor와 RE-280RA에 관한 성능을 나타냈다.
Deformable Motor의 최대 토크는 0.031mNm이었다. 이것은 RE-280RA의 1.47mNm에 비해 48분의 1의 성능이다. 한편, 모터의 중량과 소비전력도 포함해 비교하면 Deformable Motor는 0.31mNm/Wg로, ER-280RA의 0.023mNm/Wg에 대해 10배 이상의 우수한 결과가 됐다. 원리적으로는 Deformable Motor의 DEA를 48장 적층하면 자기식 모터의 토크와 동등 이상의 출력이 얻어진다. 그리고 DEA는 1층당 0.03mm이므로 적층 후에도 1.44mm로 매우 얇고 크기․중량의 관점에서 자기식 모터보다 우수한 특성을 얻을 수 있을 것으로 기대할 수 있다.
결론
모터에 부드러움을 내포하는 새로운 어프로치에 의해 변형돼도 계속 회전하는 Deformable Motor를 실현, 그 기계 특성을 밝혔다. Deformable Motor는 지금까지의 자기식 모터에 비해 중량당 에너지 밀도가 높고, 외력에 의해 변형돼도 계속 기능하는 특징을 가지고 있었다. 변형돼도 기능하는 것은 지금까지는 없는 사람–기계의 공존 사회를 실현할 가능성이 있다. 소프트 로봇에 다이내믹한 움직임, 환경에 대한 적응성과 함께 새롭게 회전운동이 융합됨으로써 신기한 기능을 부여할 수 있을 것이다. 앞으로 더욱 더 부드러운 메커니즘을 탐구해 부드럽게 변형 가능한 암을 실현, 사람과 로봇이 공존하기 위한 새로운 기술을 사회에 전개하고 싶다.
미나미노소노 아야토·호소야 나오키·마에다 신고, 시바우라공업대학 대학원 이공학연구과 기계공학
시게무네 히로키, 와세다대학 선진이공학부 응용물리학과