[첨단 헬로티]
독일 정부는 2011년에 인더스트리4.0을 내세웠으며, 2012년에는 미국 GE가 인더스트리얼 인터넷으로 산업의 고도화를 제창했다. 중국 정부는 2015년에 중국 제조 2025를 내걸었으며, 일본도 2017년에 커넥티드 인더스트리즈를 발표했다.
각국마다 명칭은 여러 가지이지만, 모두 데이터와 IT를 활용한 제조업의 혁신, 즉 스마트공장을 지향하는 것은 공통적이다. 그 목적은 스마트공장에서 이차원의 효율화를 실현, 생산 연령 인구의 감소를 극복하면서 산업 경쟁력을 높이는 것이다. 장소나 사업소의 규모에 상관없이 기업 경영은 자사 공장의 스마트화를 진중하게 생각해야 할 시대라고 할 수 있다.

스마트공장의 구축에는 구체적으로 ‘디지털화(머리)’와 ‘로봇화(몸)’의 대응이 필요하다. 어느 한쪽의 대응으로도 효율화는 추진되지만, 자사 공장이 국제 경쟁력을 발휘하고 살아남기 위한 환경을 만들기 위해서는 경영 자원을 잘 배분해 병행 추진하는 것이 좋다.
이 글에서는 로봇 도입을 본격적으로 검토하고 있는 기업 경영자에게 효율적인 로봇화의 제안을 하는 동시에, 나날이 진보하고 있는 스마트화의 흐름에 뒤쳐지지 않고 앞으로 나갈 수 있게 도움을 주고 싶다고 생각한다.
공작기계의 자동화 동향
앞에서 말한 트렌드와 같이 2018년 JIMTOF에서는 공작기계 주요 메이커인 오쿠마 ‘ARMROID’, DMG모리세이키 ‘MATRIS’, 야마자키마작 ‘TA-12/200’을 비롯해 많은 메이커에서 다관절 로봇과 공작기계의 조합이 제안됐다.
DMG모리세이키의 모리 마사히코 사장은 2030년에 유저의 모든 탈착작업을 없애는 방침을 사내외에 발표했다. 실제로는 공작기계에 갠트리나 다관절 등의 산업용 로봇을 접속해 로드/언로드하는 것은 이전부터 하고 있었으며, 새로운 기술은 아니다.
최근에 와서 공작기계 메이커 각사가 자동화를 전면에 내세우고 있는 배경에는 작업방식 개혁과 커넥티드 인더스트리즈가 있다. 단, 일본의 산업용 로봇 도입 상황은 자동차나 전기 등 양산형 공장으로 한정되어 왔다.
공작기계 주변의 로봇 도입 상황도 양산 분야에 대한 편중이 매우 크고, 중소기업을 비롯한 다품종형 공장에는 거의 보급이 이루어지지 않았다. 저변의 확대와 보급 확대는 업계뿐만 아니라, 스마트공장화를 추진하는 일본의 중요한 과제라고 할 수 있다.
로봇화를 가로막는 벽
일본에는 우수한 공작기계 메이커, 로봇 메이커가 많이 존재하고 있음에도 불구하고, 로봇화의 저변은 확대되지 못했다. 그 이유는 ①시스템 인테그레이터(SIer)와 ②유저이다.
다관절 로봇에 핸드․툴․센서․스토커․제어 등을 부가해 시스템 업하는 SIer는 사업소, 담당자 모두 압도적으로 부족하다. 특히 시스템 구상을 하는 개발 리더에게는 기계, 제어, 소프트웨어의 전문 능력과 개발팀의 매니지먼트 능력이 요구되기 때문에 어느 SIer이나 육성에 고민하고 있다.
또한, 유저 측은 로봇 도입에서 운용까지 원활하게 진행하기 위해 확실한 생산 기술과 생산 관리가 필요해지는데, 중소기업에는 이 능력이 부족한 케이스가 적지 않다.
2가지 과제를 극복해 로봇화를 추진하기 위해서는 양자의 부담을 가급적 가볍게 하는 스몰 스타트 검토가 중요하다.
무탈착을 위한 첫걸음
공작기계는 높은 부품 정도를 얻기 위해 절삭가공을 하는 기계로, 제품을 절삭하는 시간 이외에는 부가가치를 낳지 않으므로 워크 탈착작업은 없애고 싶은 작업이다. 탈착을 없애는 유효한 방법으로서 공작기계의 복합화(선반이나 머시닝센터에 부가축을 준다=복합가공기․5축 머시닝센터)에 의한 공정집약이 있다. 원척킹으로 다면가공을 하므로 지그를 줄일 수 있는 장점도 있다. 한편 가공 사이클타임은 길어지기 때문에 공정 밸런스를 중시한 흐름 생산에는 부적합한 케이스도 있다. 그 주변의 공정 설계를 잘 검토한 후에, 가급적 공작기계의 복합화를 추진하는 것이 무탈착을 위한 첫걸음이 된다.
공작기계의 복합화에는 로봇화와 상성이 좋다고 하는 또 다른 하나의 장점이 있다. 분할축을 잘 사용함으로써 워크나 지그에 부착한 절삭분과 절삭유를 떨어낼 수 있기 때문이다. 절삭분과 절삭유을 충분히 없애는 것은 운동성을 보장하기 위한 머스트 조건이라고 해도 좋으며, SIer의 부하 경감으로도 이어진다. 따라서 이미 공작기계의 복합화를 하고 있는 경우에는 그 기계에서부터 로봇화하는 것을 권하고 싶다.
로봇에 의한 무탈착 실패 사례
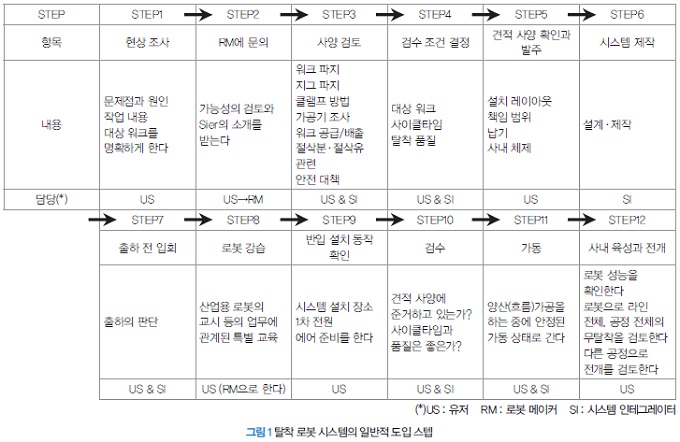
탈착을 로봇화할 때의 일반적인 도입 스텝에 대해 플로차트를 그림 1에 나타냈다. 성공 여부의 열쇠를 쥐고 있는 것은 STEP3의 사양 검토(사양 결정)이다. 예를 들면 여기서 위치결정 정도의 설정을 적절하게 결정하지 않으면, 반송 품질이나 시스템 금액에 영향이 생긴다. 혹은 안전면의 리스크 액세스 매니지먼트를 하지 않으면, 핸드․툴 형상이나 안전펜스의 방식이 결정되지 않는다. 협동 로봇을 선택해도 예리한 형상의 금속 부품을 반송하고 있다고 하면, 작업자에게 위험은 없는지를 예상해 영역 센서나 안전펜스의 검토를 한다. 이러한 검토를 하는 것은 SIer와 유저의 공동 작업인데, 결재 책임은 유저에게 있다.
필자는 적절한 사양 결정을 하기 위해서는 생산 기술과 생산 관리 능력이 중요하다고 생각한다. 사람의 작업을 암흑지가 아니라 형식지로 (디지털화) 해서 데이터 수집하고 있는지, 로봇에 반송시키는 대상 워크는 어디에서부터 어디까지인지 등에 대한 견해가 갖추어져 있으면, 로봇 시스템의 사양을 적절한 것으로 이끌어가기 쉽다.
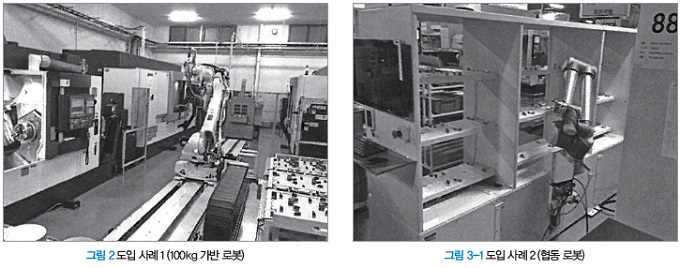
도입 사례 1(그림 2)
복합가공기 3대에 대해 100kg 가반 로봇이 7m 주행해 탈착을 하는 시스템이다. 도입에 걸린 기간은 6개월. 양산(흐름)가공이 안정적으로 시작되기까지 3개월이 더 소요됐다. 이 시스템은 안정적으로 연동한 뒤 순조롭게 투자 회수는 진행됐지만, 실패 부분이 4가지 있었다. ①도입 기간이 길다, ②세정기 라인 아웃, ③핸드 교환 유닛 추가, ④공간이 크다.
실패 요인을 분석하면, ①은 대상 워크(품종)을 줄이지 못한 것에 의한 오버 스펙(생산 관리). ②는 세정 공정의 공정 능력 인식 부족(생산 기술). ③은 상처 방지의 취급 작업 표준의 애매함(생신 기술). ④로봇이 주행하지 않아도 좋은 공정 설계의 검토 부족(생산 기술)으로 되돌아 봤다. 이들 모두는 STEP3의 시점에서 사실 데이터에 기초한 검토가 이루어졌다면 영향을 작게 할 수 있었다고 생각한다.
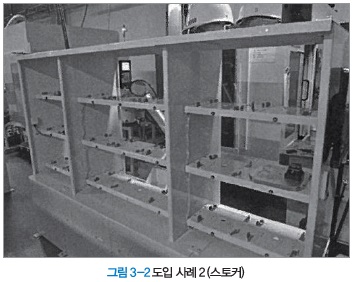
도입 사례 2(그림 3-1, 그림 3-2)
수직형 머시닝센터 1대에 대해 가반 10kg의 협동 로봇이 탈착을 하는 시스템이다. 도입에 걸린 기간은 5개월. 양산(흐름)가공이 안정적으로 시작되기까지는 4개월이 더 소요됐다. 이 시스템은 연동에는 이르렀지만, 투자 회수 기간의 예측은 당초 계획의 2배가 됐다. 실패 부분이 3가지 있었다. ①도입 기간이 길다, ②리스크 액세스 매니지먼트의 수정, ③스토커 청소 관리 공정의 증대이다.
실패 요인을 분석하면, ①은 협동 로봇의 보호 정지 설정의 재작업(SIer). ②는 스토커부에 대한 손 삽입 검토 부족(생산 기술). ③은 지그 세정의 공정 설계 검토 부족(생산 기술)로 되돌아 봤다. 협동 로봇의 채용은 신규성이 높았기 때문에 STEP3에서 불확실한 것에 대한 확인 공수가 증가했다. 수직형 (3축) 머시닝센터에 대한 로봇화 대책(절삭분, 절삭유 청소)도 과제로서 남아있다.
로봇에 의한 무탈착을 성공으로 이끄는 제안
이러한 경험이나 반성을 근거로 하면, 로봇에 의한 무탈착화는 ‘스몰 스타트=심플 스타트+퀵 스타트’의 개념이 없어서는 안 된다고 할 수 있다. 유저에게 있어 가장 중요한 것은 생산성이 향상되고, 수익 향상과 인력 부족을 해소하는 것이다. 또한, 스마트공장화를 지원하는 로봇화의 대응을 통해, 생산 기술력과 생산 관리력의 향상을 도모하는 것도 중요하다.
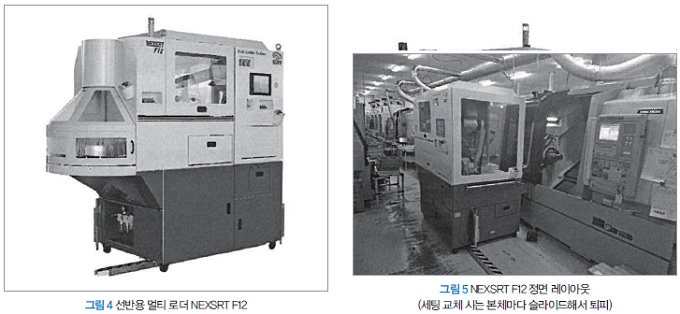
NEXSRT(넥서트) 그림 4와 그림 5는 유저의 스몰 스타트를 지원하기 위해, 철저하게 깊이 생각한 상품이다. NEXSRT의 제안은 로봇 도입 스텝을 STEP1에서 시작하는 것은 아니고, STEP11에서 시작하려고 하는 것이다. 초기 인테그레이트가 필요 없으며, STEP11에서 들어감으로써 로봇화를 가로막는 STEP3의 장벽을 피해 스타트할 수 있다. 도입 후에는 NEXSRT를 풀 가동시키기 위해 유저는 생산 관리와 생산 기술에 마주하게 된다. NEXSRT에 실을 워크를 설정․추가하고, 다음으로는 라인 전체에 대한 로봇 보급 방법을 검토하는 스텝에 들어간다. 즉 STEP11→STEP12→STEP1→STEP2→STEP3의 흐름으로, 자사의 생산 기술, 생산 관리의 능력 향상으로 스파이럴 업시켜 갈 수 있다.
그림 4는 선반용 NEXSRT F12이다. 배출 시는 워크를 회전 방향으로 컨테이너 정렬시키는 등 다관절 로봇이 아니고는 할 수 없는 움직임이 가능하다. 세팅 시에는 그림 5와 같이 본체마다 슬라이드해 퇴피하고, 복귀 시에는 로봇 핸드의 레이저 센서로 공작기계와의 거리를 측정해 보정을 하기 때문에 위치를 재현할 수 있다.

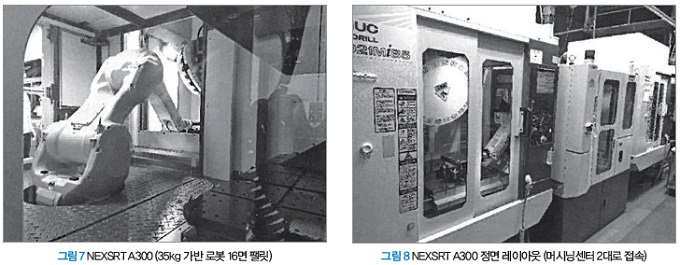
그림 6은 머시닝센터용 NEXSRT A150/A300이다. 다관절 로봇에 의한 지그 세정을 할 수 있기 때문에 절삭분과 절삭유 제거의 신뢰성이 높고, 3축 머시닝센터에서도 사용할 수 있다(그림 7). 또한 2대의 머시닝센터와 접속할 수 있는 점도 특징이다(그림 8). 회전식 스토커(그림 9)는 깔끔하게 수납되는 레이아웃으로, 다양한 공작기계 메이커의 머시닝센터와 접속 가능하다.
NEXSRT와 다른 방식의 차이
대용량 스토커를 콤팩트한 레이아웃으로 실현한 NEXSRT는 팰릿 교환 방식(MC용)이나 다단 척 핸드(선반용)가 표준 패키징되어 있으며, 범용성(다품종 대응성)에서 다른 시스템과 다르다. 극단적인 표현이지만, 시스템을 도입한 후 대상 워크를 결정하는(늘리는) 것이 쉬운 점은 최대의 특징이다. 또한, 인테그레이트가 필요 없이 가능한 점도 특징의 하나이다.

앞에서 말한 공작기계 메이커의 ‘공작기계+로봇’ 세트의 제안은 별도의 인테그레이트가 필요한 내용으로, 스몰 스타트는 불가능하다. NEXSRT 유저의 88.9%는 다관절 로봇 첫 도입 고객이다. 다관절 로봇은 리치가 길고, 유연한 동작을 실현할 수 있기 때문에 시스템을 콤팩트하게 할 수 있는 우수한 도구이다. 스마트공장화를 위해 다관절 로봇이 해야 할 역할은 크며, 지금부터 익숙하게 해 두는 것도 기업에 있어서는 중요하다. 이러한 점에서 엔트리 모델의 NEXSRT로 첫걸음을 검토한다면, 도움이 될 수 있을 것으로 생각한다.
사와 히로노부, 산와로보틱스 대표이사