
FRIT법을 이용한 비선형 PID 제어 시스템 설계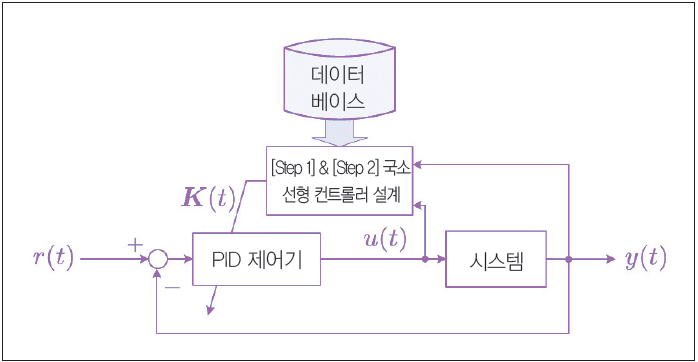
비선형 시스템에 대한 유효한 적응·학습 제어 방법으로서 계층형 뉴트럴 네트워크(Neural Network : NN)를 이용한 PID 제어법, 소뇌 연산 모델(Cerebellar Model Articulation Controller : CMAC)을 이용한 PID 제어법 혹은 데이터 구동형(Data-Driven : DD) 접근에 기초한 PID 제어법 등이 제안되고 있다.
이러한 방법은 모두 평가 규범의 기울기를 이용해 최솟값을 탐색한다. 이른바 기울기법에 기초한 학습법칙에 의해 PID 게인이 조정된다. 이때, 학습에 많은 시간이 있어야 하는 것이 실장하는 데 큰 방해가 된다. 오프라인 학습인 경우에는 학습 시간은 그다지 큰 문제가 되지 않지만, 학습에는 제어 대상을 모의한 에뮬레이터가 필요하고, 제어 대상이 비선형 시스템이라는 것을 고려하면 이것의 구축도 쓸데없는 것 중 하나가 된다. 따라서 에뮬레이터 등을 필요로 하지 않고 오프라인으로 학습할 수 있는 것이 바람직하다.
그러나 제어 시스템 설계에서는 우선 제어 대상 모델을 구축하는 것에서 시작해 그 모델에 기초해 제어 시스템을 구성하는 것과 같은 이른바 모델 기반형 제어 시스템 설계법에 의해 이루어지는 것이 대부분이다.
이에 대해 실험 데이터에서 직접적으로 제어 파라미터를 산출하는 Virtual Reference Feedback Tuning(VRFT)이나 Fictitious Reference Iterative Tuning(FRIT)법이 최근 주목을 받고 있다. 이들 방법은 1회의 실험 데이터로부터 제어 파라미터를 직접적으로 산출할 수 있기 때문에 제어계 설계를 간략화할 수 있다. 또한, 실험 데이터로서 폐루프 데이터를 이용할 수 있는 점이나 식별용 신호(M 계열 신호나 PRBS 신호 등)가 불필요하다는 점 등 실용 관점에서도 유용한 것으로 생각된다.
여기서는 계층형 뉴트럴 네트워크(NN), 소뇌 연산 모델(CMAC), 그리고 데이터 구동형(DD) 제어기의 학습에 FRIT법을 도입함으로써 에뮬레이터 등을 구축하지 않고 1회의 실험 데이터만으로 오프라인 학습이 가능하다는 것을 보여준다.
FRIT법은 지금까지 대부분 선형 시스템을 대상으로 하여 고찰됐지만, 여기서는 FRIT법이 비선형성 시스템으로 확장된다는 것을 알 수 있다.
#[그림 : FRIT.jpg]-----------------------------