
카오스 제어 98회
기계공학에서의 비선형 특성 Ⅻ
이번 호부터는 기계공학에서의 비선형 특성으로서 진동에 의한 충격 발진을 중심으로 설명한다.
소개
진동충격 시스템들은 과학계에서 주목하기 전에는 문외한 학문으로 인식됐다. 이는 물 표면 위에 돌을 던졌을 때 튀는 게임(stone skipping)과 딱따구리 장난감이 부리를 찍는 것(woodpecker toy)과 같은 것이 공통적인 사례이다.
Stone skipping 게임은 해석적, 물리적 통찰력을 마련하기 위하여 많은 연구자의 관심을 끌어왔었다. Woodpecker toy는 마찰, 충격, 하중의 조합 효과로 인하여 자기여기 진동으로 동작한다. 이 장난감 운동은 자극적인 충격들에 의해 영향을 받았으며 이는 불연속 분기의 원인이 된다. Woodpecker toy는 1차원 포엔카레 맵으로 분석될 수 있다.
일반적으로 진동충격 시스템들은 상태 공간의 도약(jump) 형태 속에서 다중 충격 상호작용을 포함한다. 대부분은 충격에 의한 에너지 손실이 있으며 회복 계수는 일반적으로 충격 사건과 관련한 에너지 소산의 차수를 측정한다. 충격 기간에 포함된 시간 크기는 발진의 자연 주파수 시간 크기보다 훨씬 작다. 마찰이 있는 상태와 없는 상태에서 진동충격 시스템 운동은 강한 비선형 비평활 미분 방정식에 의해 일반적으로 기술된다.
모델링과 해석적 접근
진동충격 시스템의 해석적 모델링은 이들 시스템의 동적 거동 예측에서 매우 중요하다. 이 시스템은 충격이 없는 상태에서 선형이거나 또는 비선형이 될 수 있다. 그러나 충격이 존재하거나, 마찰 또는 이 두 가지 모두가 존재하는 경우에 이것은 강한 비선형이 된다. 이 강한 비선형성은 방향에 있어서 갑작스러운 변화의 충격 경험 이전과 이후 속도의 사실에 근거하므로 이는 비평활 동력학으로 알려진다. 3개의 특별한 기법들은 비평활 모델을 평활 모델로 변환하기 위하여 수년 동안 개발됐다.
이들은 멱급수 현상학적 모델링(power-law phenomenological modeling), Zhuravlev와 Ivanov 비평활 좌표 변환(non-smooth coordinate transformations), Hertzian의 접촉 법칙(contact law)을 포함하며 구분 선형 시스템(piecewise linear systems)으로 알려져 있으며 point-wise 사상(mapping)을 이용하여 문헌에서 다루어졌다.
이 접근은 2단계에서 선형 미분 방정식을 푼다. 각 단계의 초기조건들은 신호 주기의 끝에서 이전 단계의 해의 값으로 취한다. 다른 기법들은 톱니 시간 변환(saw-tooth-time transformation)을 포함한다. 여기서는 이들 접근의 기본 원리들을 설명한다.
멱급수 현상학적 모델링
이 모델을 이해하기 위해서 그림 1(a)에서 보여주는 것과 같이  에서 위치된 2개 벽 사이의 입장 이동을 고려 한다.
에서 위치된 2개 벽 사이의 입장 이동을 고려 한다.
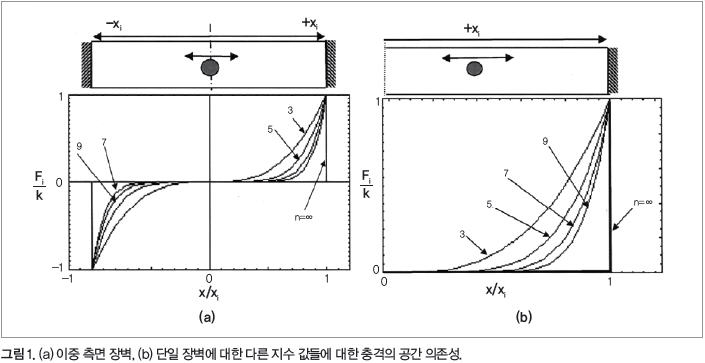
강체 충격을 가정하면 하나는 제한 조건  을 가져야만 한다. 여기서
을 가져야만 한다. 여기서  는 입자 변위이다. 이 모델링은 보상 계수의 정의와 함께 운동 방정식에 의해 충격을 표시한 Shaw와 Shaw에 의해 사용된 방법을 확장한 것과 유사하다. 이 충돌은 불연속 과정으로서 가정된다. 이전에 알려진 교차점에서 하나의 해가 일치해야만 하므로 이 제한은 복잡한 분석이다. 이러한 형태를 보인 제한의 동작을 피하기 위하여 상호작용의 특별한 잠재적 영역을 가진 장벽과 시스템 사이의 상호작용을 기술하는 현상학적을 도입할 수 있으며, 이는 물체 표면과 장벽 사이의 영역에서 매우 약하지만, 점의 이웃에서 고속 성장이 된다. 따라서 상호작용의 힘은 멱급수함수에 의하여 현상학적으로 표현될 수 있다.
는 입자 변위이다. 이 모델링은 보상 계수의 정의와 함께 운동 방정식에 의해 충격을 표시한 Shaw와 Shaw에 의해 사용된 방법을 확장한 것과 유사하다. 이 충돌은 불연속 과정으로서 가정된다. 이전에 알려진 교차점에서 하나의 해가 일치해야만 하므로 이 제한은 복잡한 분석이다. 이러한 형태를 보인 제한의 동작을 피하기 위하여 상호작용의 특별한 잠재적 영역을 가진 장벽과 시스템 사이의 상호작용을 기술하는 현상학적을 도입할 수 있으며, 이는 물체 표면과 장벽 사이의 영역에서 매우 약하지만, 점의 이웃에서 고속 성장이 된다. 따라서 상호작용의 힘은 멱급수함수에 의하여 현상학적으로 표현될 수 있다.
 (1)
(1)
여기서  은 정수이고
은 정수이고  는 양의 정수 파라미터이며 일반적으로 실험 측정으로부터 추정된다. 이와 같은 표현은 Hunt와 Crossley에 의해 진동 충격 문제에서 제안됐으며 Pilipchus와 Ibrahim, El-Sayad, Ibrahim과 El-Sayad에 의해 이동 컨테이너의 액체 출렁거림 충격의 시뮬레이션에서 제안되었다.
는 양의 정수 파라미터이며 일반적으로 실험 측정으로부터 추정된다. 이와 같은 표현은 Hunt와 Crossley에 의해 진동 충격 문제에서 제안됐으며 Pilipchus와 Ibrahim, El-Sayad, Ibrahim과 El-Sayad에 의해 이동 컨테이너의 액체 출렁거림 충격의 시뮬레이션에서 제안되었다.
그림 1은 이중과 단일 장벽  의 다른 값에 대하여 공간 좌표
의 다른 값에 대하여 공간 좌표  의 충격력의 의존성을 보여준다.
의 충격력의 의존성을 보여준다.  로 진행함으로써 절대적으로 강성을 가진 강체가 된다. 여기서 대응하는 퍼텐셜 에너지는 잘 구성된 제곱을 취한다. 의 한정적이고 큰 값에 대하여 상호작용 장(field)은 에서 절대적으로 국부화(localized)되지 않는다. 이것은 시스템과 장벽 모두가 절대적으로 강성을 가지지 않는다는 것을 의미하지만, 이중 측면 장벽에 대하여 의 충격 영역에서 작은 변형을 허용한다. 비선형 표면 제동을 가진 비선형 표면 강성은 실제 기계장치로부터 잡음 방사와 신뢰성을 연구하는 논문에 의해 채택되었다.
로 진행함으로써 절대적으로 강성을 가진 강체가 된다. 여기서 대응하는 퍼텐셜 에너지는 잘 구성된 제곱을 취한다. 의 한정적이고 큰 값에 대하여 상호작용 장(field)은 에서 절대적으로 국부화(localized)되지 않는다. 이것은 시스템과 장벽 모두가 절대적으로 강성을 가지지 않는다는 것을 의미하지만, 이중 측면 장벽에 대하여 의 충격 영역에서 작은 변형을 허용한다. 비선형 표면 제동을 가진 비선형 표면 강성은 실제 기계장치로부터 잡음 방사와 신뢰성을 연구하는 논문에 의해 채택되었다.
다른 방법으로 참고문헌에 의해 도입한 평활 삼각-선형 스프링 모델을 식 (2)와 같이 고려하자.
 (2)
(2)
여기서  는 자유 갭(free gap)이다. 이 모델링은 0과
는 자유 갭(free gap)이다. 이 모델링은 0과  =
= 의 제한을 가지고 날카로운 불연속을 평활하게 하는 적절한 자유 갭을 표현하는 것이 가능하다. 충격 기간의 제동 효과들은 공간적으로 의 부근에서 국부화된다. 국부화된 소산력은 식 (3)의 표현에 의해 양측 장벽에 대하여 현상학적으로 표현될 수 있다.
의 제한을 가지고 날카로운 불연속을 평활하게 하는 적절한 자유 갭을 표현하는 것이 가능하다. 충격 기간의 제동 효과들은 공간적으로 의 부근에서 국부화된다. 국부화된 소산력은 식 (3)의 표현에 의해 양측 장벽에 대하여 현상학적으로 표현될 수 있다.
 (3)
(3)
여기서  는 상수 계수로서 실험적으로 결정된다.
는 상수 계수로서 실험적으로 결정된다.  은 양의 정수이며 · 은 시간에 대응하는 미분을 나타낸다. Paidoussis와 Semler는 캔틸레버 파이프 수송 유체상의 충격으로 인한 제한을 가진 비선형 힘을 표현하기 위하여 유사한 현상학적 모델링을 채택했다. Kim 등은 몇 개의 평활 함수들을 제안하고 단일 자유도 시스템의 비선형 주파수 응답 특성들에서 이들의 영향을 검증했다. Andrianov와 Awrejcewicz는 제동과 높은 출력 형태 비선형성을 가진 시스템의 비대칭적 거동을 개발했다.
은 양의 정수이며 · 은 시간에 대응하는 미분을 나타낸다. Paidoussis와 Semler는 캔틸레버 파이프 수송 유체상의 충격으로 인한 제한을 가진 비선형 힘을 표현하기 위하여 유사한 현상학적 모델링을 채택했다. Kim 등은 몇 개의 평활 함수들을 제안하고 단일 자유도 시스템의 비선형 주파수 응답 특성들에서 이들의 영향을 검증했다. Andrianov와 Awrejcewicz는 제동과 높은 출력 형태 비선형성을 가진 시스템의 비대칭적 거동을 개발했다.
식 (4)와 같이 미분 방정식에 의해 기술된 진동-충격 발진기를 고려하자. (4)
(4)
여기서 퍼텐셜  는 식 (5)와 같은 일반 전력 형태를 보인다.
는 식 (5)와 같은 일반 전력 형태를 보인다. (5)
(5)
여기서  ,
,  ,
,  0, 1, 2,
0, 1, 2,  는 양의 강체 함수이다. 식 (4)는 많은 연구자에 의해 해결됐다. 식 (5)에 고조파 평형법을 적용하기 위하여 지수의 분모와 분자 양쪽은 홀수가 되어야만 한다.
는 양의 강체 함수이다. 식 (4)는 많은 연구자에 의해 해결됐다. 식 (5)에 고조파 평형법을 적용하기 위하여 지수의 분모와 분자 양쪽은 홀수가 되어야만 한다.
평활 함수의 도움을 가진 탄성 충격의 근사 설명을 가진 비선형 모델들이 단일측 충격에 대하여  , 양측 충격과 역멱급수 퍼텐셜
, 양측 충격과 역멱급수 퍼텐셜  에 대하여 짝수 멱급수를 이용하여 개발했다. 이것은 두 개의 모델이 1보다 작은 속도-독립 복원 계수를 가지고 비탄성 충격의 경우를 기술하는데 일반화할 수 있음을 검증한 것이다. 이 수정은 다른 매우 강한 비선형 소산 항에 의해 달성되었다. Pilipchuk은 일반화된 형태의 탄성력과 점성 제동을 가지고 강한 비선형 발진기의 그룹을 고려했다. 명백한 해석적 해는 평활과 비평활 함수의 조합으로서 구해진다.
에 대하여 짝수 멱급수를 이용하여 개발했다. 이것은 두 개의 모델이 1보다 작은 속도-독립 복원 계수를 가지고 비탄성 충격의 경우를 기술하는데 일반화할 수 있음을 검증한 것이다. 이 수정은 다른 매우 강한 비선형 소산 항에 의해 달성되었다. Pilipchuk은 일반화된 형태의 탄성력과 점성 제동을 가지고 강한 비선형 발진기의 그룹을 고려했다. 명백한 해석적 해는 평활과 비평활 함수의 조합으로서 구해진다.
Zhuravlev 비평활 좌표 변환
이 변환은 탄성 장벽뿐만 아니라 비탄성 장벽을 가정한 Zhuravlev에 의해 최초로 소개되었다. 이와 같은 좌표 변환의 주요 이유는 진동-충력 발진기를 운동의 대응 방정식이 임의의 충격 항을 포함하지 않는 장벽이 없는 발진기 속으로 변환하는 것이다. 변환된 형태 속에서 운동 방정식을 풀기 위하여 임의의 점근 표준 근사 기법을 이용할 수 있다. 이 기법은 이전에 Soviet Union과 Ezovskikh이 제안한 이동 장벽을 가지고 진동-충격 시스템의 운동 방정식의 우변의 무한 불연속을 제거하는 변수 변화를 제안한 연구자들에 의해 폭넓게 사용됐다.
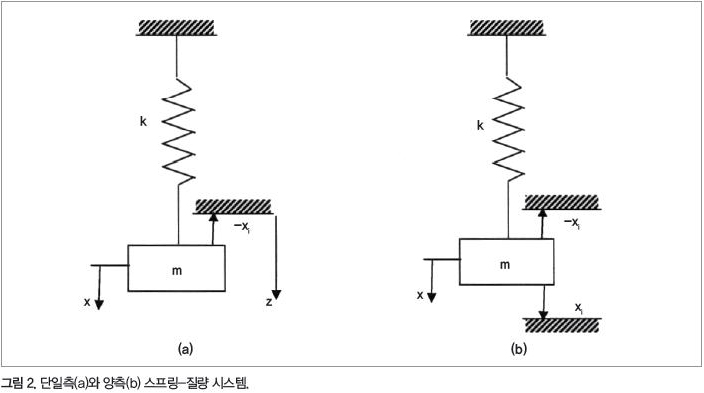
일반적인 문제들의 수는  위치에서 단일측 장벽을 가진 시스템 충격에 대하여 식 (6)을 이용하여 그림 2(a)와 같이 구한다.
위치에서 단일측 장벽을 가진 시스템 충격에 대하여 식 (6)을 이용하여 그림 2(a)와 같이 구한다.
이 변환은  의 장벽과 새로운 위상 평면
의 장벽과 새로운 위상 평면  에서 원래의 위상 평면
에서 원래의 위상 평면  상의 위상 평면 궤적의 도메인
상의 위상 평면 궤적의 도메인  의 맵으로 이동한다. 시간에 대응하는 첫 번째와 두 번째 미분은
의 맵으로 이동한다. 시간에 대응하는 첫 번째와 두 번째 미분은  와
와  이다.
이다.  은
은  에서 그 부호가 변화하기 때문에
에서 그 부호가 변화하기 때문에  이 됨을 주목해야 한다.
이 됨을 주목해야 한다.
비탄성 충격의 경우에 조건  가 도입되어야 하며, 여기서
가 도입되어야 하며, 여기서  는 복원계수이며
는 복원계수이며  와
와  들은 각각 충격 전과 후의 시스템 속도이다. 비탄성 충격과 관련된 추가적인 제동들은 원래부터 가지고 있는 선형과 비선형 제동 항보다 더 중요할 수 있음을 주목해야 한다.
들은 각각 충격 전과 후의 시스템 속도이다. 비탄성 충격과 관련된 추가적인 제동들은 원래부터 가지고 있는 선형과 비선형 제동 항보다 더 중요할 수 있음을 주목해야 한다.
계수  는 1에 근접하며
는 1에 근접하며  가 작은 파라미터로서 고려되었다. 식 (6)에 의해 주어진 좌표 변환에 따르면 충격은
가 작은 파라미터로서 고려되었다. 식 (6)에 의해 주어진 좌표 변환에 따르면 충격은  에서 단일측 장벽이며 따라서
에서 단일측 장벽이며 따라서  에서 정의한 충격 조건
에서 정의한 충격 조건  는
는  에서 식 (7)과 같이 변환된다.
에서 식 (7)과 같이 변환된다.
 (7)
(7)
변환된 속도 점프는  에 비례하여 줄어들게 된다. 이 점프는 디락 델타 함수를 이용하여 운동 방정식 속으로 도입할 가능성이 있으므로 식 (7)의 조건을 피할 수 있다. 충격으로 인한 추가적인 제동 항은 식 (8)과 같이 쓰일 수 있다.
에 비례하여 줄어들게 된다. 이 점프는 디락 델타 함수를 이용하여 운동 방정식 속으로 도입할 가능성이 있으므로 식 (7)의 조건을 피할 수 있다. 충격으로 인한 추가적인 제동 항은 식 (8)과 같이 쓰일 수 있다.
 (8)
(8)
여기서  는 충격의 순시 시간이다. Zhuravlen은 시간 영역에서 공간 영역으로 변수들의 변환을 소개했다. 이것은
는 충격의 순시 시간이다. Zhuravlen은 시간 영역에서 공간 영역으로 변수들의 변환을 소개했다. 이것은  을 설정함에 의해
을 설정함에 의해  와 같이 수행하였고 이는
와 같이 수행하였고 이는  와 같이 쓸 수 있다. 이 경우에 식 (8)은 식 (9)와 같은 형태로 쓸 수 있다.
와 같이 쓸 수 있다. 이 경우에 식 (8)은 식 (9)와 같은 형태로 쓸 수 있다. (9)
(9)
그림 2(b)에서 보는 것과 같이 2개 장벽들 사이의 거리  을 가진 2개의 측면 장벽의 경우에서 하나는 스프링 질량 시스템을 고려할 수 있으며 여기서 질량은 장벽들 사이의 갭의 중간에 위치된다. 이 경우에 식 (10)과 같은 좌표 변환을 소개할 수 있다.
을 가진 2개의 측면 장벽의 경우에서 하나는 스프링 질량 시스템을 고려할 수 있으며 여기서 질량은 장벽들 사이의 갭의 중간에 위치된다. 이 경우에 식 (10)과 같은 좌표 변환을 소개할 수 있다. (10)
(10)
여기서 S(z)는 식 (11)과 같이 정의되는 구분 톱니형 선형 함수(piecewise saw-tooth piecewise linear function)이다.
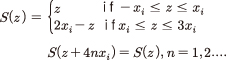 (11)
(11)
단위 스프링-질량 시스템의 라그랑지안  이며, 여기서
이며, 여기서  는 시스템의 퍼텐셜 에너지, · 은 시간
는 시스템의 퍼텐셜 에너지, · 은 시간  에 대응하는 미분을 나타낸다. 변환된 좌표의 항에서 라그랑지는 식 (12)와 같이 취할 수 있다.
에 대응하는 미분을 나타낸다. 변환된 좌표의 항에서 라그랑지는 식 (12)와 같이 취할 수 있다. (12)
(12)
제한들의 조건이  로 인하여 임의의
로 인하여 임의의  에 대하여 자동적으로 만족함을 주목해야 하며 해밀톤 원리는 식 (13)과 같은 제한이 없는 운동의 미분 방정식을 제공한다.
에 대하여 자동적으로 만족함을 주목해야 하며 해밀톤 원리는 식 (13)과 같은 제한이 없는 운동의 미분 방정식을 제공한다.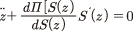 (13)
(13)
여기서 ‘은  에 대응하는 미분을 나타낸다. 함수
에 대응하는 미분을 나타낸다. 함수  는 연속 함수에 속하지만, 비평활 함수이다. 이것의 첫 번째 미분
는 연속 함수에 속하지만, 비평활 함수이다. 이것의 첫 번째 미분  는
는  에 대하여 이들 점 에서 바운드된 점프를 가져왔다.
에 대하여 이들 점 에서 바운드된 점프를 가져왔다.
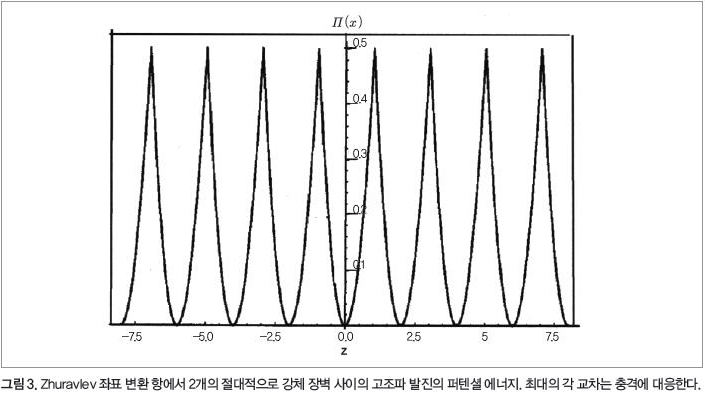
물리적 방정식 (13)은 그림 3에서 보여주는 것과 같이 주기적 비평활 퍼텐셜장에서 입자 이동을 나타낸다.
변환된 시스템 식 (13)은 장벽이 없는 평활 좌표의 항으로 기술된다. 속도  는 구간
는 구간  의 경계에서 부호는 변화하며 반면 변환된 시스템의 속도
의 경계에서 부호는 변화하며 반면 변환된 시스템의 속도  는 연속으로 남아있다. 더욱이 점
는 연속으로 남아있다. 더욱이 점  에서 해의 다른 조각의 정합 문제를 더 이상 다루지는 않는다.
에서 해의 다른 조각의 정합 문제를 더 이상 다루지는 않는다.
식 (10)은 자동적으로 이와 같은 정합을 제공하고 해에 대한 유일한 표시는 더 이상의 조작을 위한 보다 편리성을 제공한다. 변환의 더욱 중요한 장점들은 변환된 시스템의 항에서 진동-충격 운동의 특수 기하학적인 처리를 가져온다. 각각의 충격 사건은 그림 3에서 보여준 것과 같이 주기적인 퍼텐셜 장의 새로운 셀 속으로의 전송(점프)에 대응한다. 이와 같은 시각은 흥미 있는 물리적 특성으로 나타낼 수 있다.
Ivanov 변환
수정된 비평활 좌표 변환은 비탄성 충격 효과에 대하여 Ivanov에 의해 개발됐다. 일반화된 좌표의 항에서  ,
,  은 일방적인 제한
은 일방적인 제한  의 주제이며 이들 시스템은 식 (14)와 같은 벡터 형태의 방정식 집합으로 표시될 수 있다.
의 주제이며 이들 시스템은 식 (14)와 같은 벡터 형태의 방정식 집합으로 표시될 수 있다. (14)
(14)
여기서  ,
,  는 일반화된 운동량이다.
는 일반화된 운동량이다.
함수  는 주기
는 주기  를 가진 주시 함수,
를 가진 주시 함수,  는 전치를 나타낸다. 충격의 순간인
는 전치를 나타낸다. 충격의 순간인  에서 식 (15)를 얻으며 점탄성 모델에 의해 식 (16)과 같이 표현된다.
에서 식 (15)를 얻으며 점탄성 모델에 의해 식 (16)과 같이 표현된다.
 (15)
(15)
식 (15)에서 초기 조건을 고려하여 풀면 식 (16)과 같이 정리된다. (16)
(16)
여기서  ,
,  ,
,  ,
,  이다.
이다.  은 충격의 주기가 매우 작다는 것을 의미하고 따라서 변수
은 충격의 주기가 매우 작다는 것을 의미하고 따라서 변수  는 충격 기간에는 변화하지 않는다. 한편 변위
는 충격 기간에는 변화하지 않는다. 한편 변위  와 속도
와 속도  는 2개의 다른 제한 영역을 가진다.
는 2개의 다른 제한 영역을 가진다.
첫 번째 영역은  이며 충격
이며 충격  의 주기는
의 주기는  에 가깝다. 복원력은 식 (17)에 의해서 주어 진다.
에 가깝다. 복원력은 식 (17)에 의해서 주어 진다. (17)
(17)
Ivanov는 식 (18)과 같은 새로운 좌표 변환을 소개했다. (18)
(18)
여기서  ,
,  이다. 값
이다. 값  와
와  는 제한이 없다.
는 제한이 없다.  의 치환은 각 벡터
의 치환은 각 벡터  가
가  와
와  에 대하여 2개의 가역을 가지므로 가역적이다. 따라서 모든
에 대하여 2개의 가역을 가지므로 가역적이다. 따라서 모든  에 대하여 식 (19)와 같은 변환에 따른 유일한 허상
에 대하여 식 (19)와 같은 변환에 따른 유일한 허상  가 존재한다.
가 존재한다.  (19)
(19)
여기서  는 차원
는 차원  의 대각행렬이다. 식 (14)의 운동 방정식은 식 (20)과 같은 변환된 형태를 취하게 될 것이다.
의 대각행렬이다. 식 (14)의 운동 방정식은 식 (20)과 같은 변환된 형태를 취하게 될 것이다. (20)
(20)
식 (20)은  와
와  와 같은 항의 존재로 인하여 불연속 우변 항을 가진다. 그러나 이 해들은 시간 영역에서 연속 벡터 함수이며 미분 가능한
와 같은 항의 존재로 인하여 불연속 우변 항을 가진다. 그러나 이 해들은 시간 영역에서 연속 벡터 함수이며 미분 가능한  을 제공한다. 식 (20)에서 첫 번째 방정식은 식 (21)이 됨을 주목하다.
을 제공한다. 식 (20)에서 첫 번째 방정식은 식 (21)이 됨을 주목하다. (21)
(21)
 이므로 곱
이므로 곱  들은 양에서 음으로 그 부호가 변화한다. 이전의 교점은
들은 양에서 음으로 그 부호가 변화한다. 이전의 교점은  지만 이후의 교점은
지만 이후의 교점은  이다. 순수한 탄성 충격 즉,
이다. 순수한 탄성 충격 즉,  에 대하여 변환은 Zhuravlev에 의해 개발한 것보다 하나가 줄어든다.
에 대하여 변환은 Zhuravlev에 의해 개발한 것보다 하나가 줄어든다.
Hertzian 접촉
1. 모델링
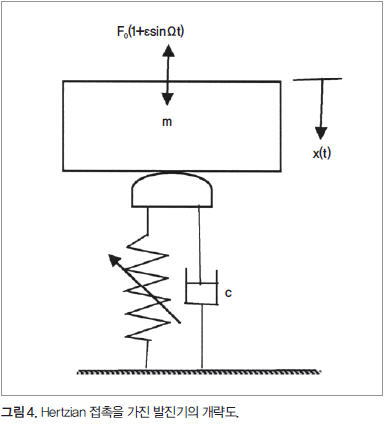
Hertzian 접촉은 인가된 부하 아래서 약간 변형되거나 접촉에서 오는 2개의 휘어진 표면에서 나타나는 국부 응력에 기초한다. 이 변형들은 접촉에서 재료의 탄성 즉, 탄성 계수에 의존한다. 이 접촉 응력은 일반적으로 정상적인 접촉력, 곡면 반경과 두 물체의 탄성 계수의 함수로서 주어진다. Hertzian 접촉은 침투의 항에서 정상적인 힘  인 식 (22)에 의해 표시한다.
인 식 (22)에 의해 표시한다.
 (22)
(22)
여기서  는 접촉 강성 계수이며 접촉 물체의 기하학과 탄성 특성의 함수이다. 이 계수는 Antoine 등에 의해 상세하게 유도되었다. Hertzian 탄성점에 대한
는 접촉 강성 계수이며 접촉 물체의 기하학과 탄성 특성의 함수이다. 이 계수는 Antoine 등에 의해 상세하게 유도되었다. Hertzian 탄성점에 대한  의 값들은 3/2이며 확장된 평면 접촉(비 Hertzian)은 3/2-7/2의 범위이다. 접촉 강성은 구면 접촉에 대하여 Hertzian 접촉 모델과 같은 해석적 접촉 모델로부터 구해진다. 식 (22)는 접촉 면적이 충돌 입자 물체의 기학학과 비교하여 작은 한 유용하며 접촉 면적은 충격이 마찰과 관련되지 않은 영구적으로 평활하다. 더욱이 충격 물체들의 재료들은 등방성이며 선형적으로 탄성인 것을 가정한다.
의 값들은 3/2이며 확장된 평면 접촉(비 Hertzian)은 3/2-7/2의 범위이다. 접촉 강성은 구면 접촉에 대하여 Hertzian 접촉 모델과 같은 해석적 접촉 모델로부터 구해진다. 식 (22)는 접촉 면적이 충돌 입자 물체의 기학학과 비교하여 작은 한 유용하며 접촉 면적은 충격이 마찰과 관련되지 않은 영구적으로 평활하다. 더욱이 충격 물체들의 재료들은 등방성이며 선형적으로 탄성인 것을 가정한다.
접촉의 거친 표면에 대하여 GW(Greenwood와 Willjamson)에 개발된 통계적 모델이 일반적으로 접촉 강성을 추정하기 위해 사용된다. 그림 4에서 보여주는 구면평면 Hertizan 접촉의 경우 Perret-Liaudet은 식 (23)과 식 (24)의 운동 방정식으로 기술하는 발진기의 2차 서브하모닉과 수퍼하모닉 공진에 관해 연구했다.
 에 대하여
에 대하여  (23)
(23)
 에 대하여
에 대하여  (24)
(24)
여기서  는 정적 외부 부하 성분,
는 정적 외부 부하 성분,  는 고조파 부하 성분의 주파수,
는 고조파 부하 성분의 주파수,  는 고조파 성분의 진폭이다. 정적 접촉 압축과 선형화된 자연 주파수들은 각각
는 고조파 성분의 진폭이다. 정적 접촉 압축과 선형화된 자연 주파수들은 각각  와
와  표현에 의해 주어진다. 식 (23)과 식 (24)는 비차원 형태로 식 (25)와 식 (26)으로 정리된다.
표현에 의해 주어진다. 식 (23)과 식 (24)는 비차원 형태로 식 (25)와 식 (26)으로 정리된다.
 에 대하여
에 대하여  (25)
(25)
 에 대하여
에 대하여  (26)
(26)
여기서 비차원 파라미터  . ‘은 비차원 파라미터
. ‘은 비차원 파라미터  ,
,  ,
,  에 대응하는 미분이다.
에 대응하는 미분이다.
브레이킹 시스템의 접촉 강성
자동차 브레이킹 시스템에서 슬라이딩 표면 사이의 접촉력들은 강한 비선형성과 비평활성이며 따라서 채터(진동으로 꺾인 면에 생긴 금이 간 무늬)와 끼익 하는 소리에서 복잡한 동적 특성에서의 결과가 될 수 있다. 이것은 접촉 강성, 실제 접촉 면적, 접촉력은 브레이킹 시스템의 동적 거동에서 중요한 역할을 담당한다.
이 파라미터들은 접촉 동력학과 인터페이스 모델링에서 중요하다. 자동차 브레이킹 시스템의 중요성 이외에 로봇 응용, 자기 저장 하드 디스크 드라이버에서 마이크로 베어링과 스핀들 베어링과 약하게 적재된 기계적 접합과 같은 다른 응용에서도 중요하다. 슬라이딩 마찰 측정들은 주파수가 접촉 강성과 슬라이더 질량에 의해 결정되는 자연적인 정상 마이크로 진동의 존재를 나타낸다. 접촉 강성은 정상적인 변위 함수에서 찾아졌다. 음의 마찰 속도 기울기와 여기 진동 모두에 의해 발견된 Tolstoi은 정상 방향에서 이동하기 위한 슬라이더의 자유를 가진 것과 밀접하게 관련된다.
Carson과 Johnson, Gray와 Johnson은 때때로 주름을 유도하는 비탄성 변형은 탄성-플라스틱 고체들 사이의 Hertzian 접촉의 현상이 주된 원인이다. Nayak은 탄성 반-공간에 대하여 탄성 볼 롤링의 진동을 고려했다. 접촉력들은 점성 댐퍼와 비선형 접촉 스프링에 의해 표현된다. Nayak은 에너지 손실이 응력 주파수에 의존하는 복잡한 제동 모델을 개발했다. Sosnovskiy와 Sherbakov은 불규칙한 물결 모양의 잔류 손상을 다루는 몇몇 실험 결과들을 보고했다. 이러한 현상은 순환 변형의 비정상 과정의 결과로서 롤링 마찰력에서의 접촉 면적에서 발생할 수 있다. 이 손상들은 능동 시스템의 진동-충격 부하의 시작이다. 이것은 변위의 펄스화에 의해 동반된 접촉 압력의 급격한 준주기 변화의 결과로서 진동 충격 에너지임을 결론으로 맺는다.
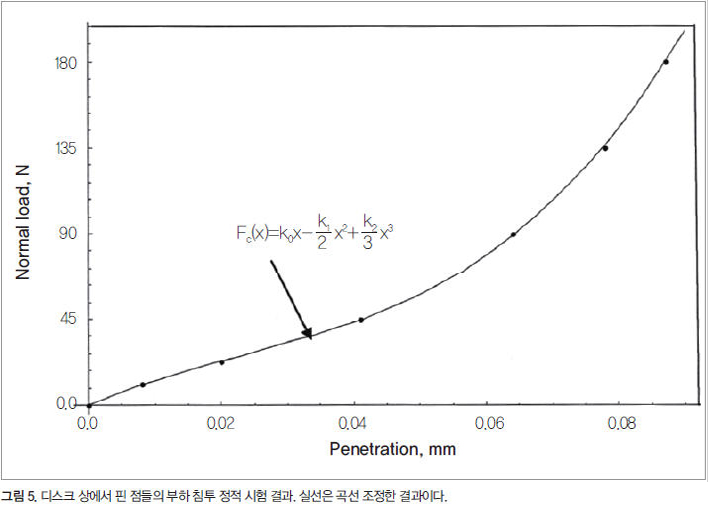
Hess와 Soom은 고조파 정상 부하에서 정상 진동과 마찰을 시험했다. 이들은 Hertzian과 거친 평면 접촉을 고려했다. Hertzian 접촉은 양과 음의 계수를 가진 2차와 3차 강성 비선형성을 가진 비선형 상미분 방정식을 만들어 낸다. 이들은 다중 스케일 기법을 사용했으며 그 결과는 유연한 진폭-주파수 응답 특성을 나타낸다. 유연 효과는 접촉 강성의 감소와 관련된다. Castravete 등은 핀 디스크 시스템에서 접촉 강성을 측정하였고 정상 강성이 연성과 강성 비선형성의 혼합임을 찾았다. 이것은 식 (27)에 의해 현상학적으로 표현 된다.  (27)
(27)
여기서  ,
,  ,
,  들은 양의 상수이며
들은 양의 상수이며  는 정상 침투이다.
는 정상 침투이다.
그림 5는 침투 위의 정상 부하의 비선형 의존성을 보여준다. 식 (27)은 그림 5에서 보여주는 곡선 조정의 기울기로부터 얻어진다.
접촉 강성을 측정하기 위하여 접촉력의 영향 아래서 탄성 변형을 측정해야만 한다. 마찰-진동 안정도의 시작은 때때로 마찰-속도 기울기는 제동 계수 시스템과 비교했을 때 높은 슬라이딩의 상대속도를 가진 마찰력에서 역 진동에 관계된다.
Sherif는 슬라이딩 표면의 안정도 산의 유효 접촉 강성의 영향을 연구했다. 마찰 진동의 불안정성은 시스템의 강성뿐만 아니라 슬라이딩 표면의 전체 기울기 접촉 강성의 값에 의존한다는 것을 찾았다. 더욱이 마모 기계에 의한 등가 접촉 강성의 연속 수정은 끼익 소리가 나는 주요 원인이 됨을 찾았다. 이 분석은 안정도는 기하학적 배열의 우수한 선택과 특정한 한계 내의 재료 손실에 의해 마찰 패드의 모든 가능한 한 끼익 소리 나는 주파수에서 얻을 수 있음을 나타낸다.
점-방향 매핑
점-방향 매핑은 식 (28)의 운동 방정식에 의해 기술된  에 대하여 진동-충격 시스템의 고려에 의해 검증될 수 있다.
에 대하여 진동-충격 시스템의 고려에 의해 검증될 수 있다. (28)
(28)
식 (28)의  와
와  에 대한 속도 제한은 식 (29)와 같이 주어진다.
에 대한 속도 제한은 식 (29)와 같이 주어진다.
 (29)
(29)
이 해들은 스텝 방향 적분에 의해 구해질 수 있다. 이것은 점-방향 매핑법으로 알려져 있으며, 여기서 하나는 충격점에서 해와 일치한다. 구소련에서는 이것은 ‘stitching’방법으로 알려져 있다. 이 방법에서 운동 방정식은 충격들 사이를 적분했다. 운동학적 충격 조건들은 해의 시간 구간 사이를 스위치 하기 위해 사용됐으며 몇몇의 충격을 포함한 시간을 넘어서는 해들은 부분 해들의 적당한 수를 모아 붙임으로써 얻어졌다.
식 (28)은 일반적으로 중량이  에서 장벽을 칠 때까지 자유 비행 궤적 기간 주어진 초기조건의 설정 기간에 대하여 풀었다. 충격 조건은 단지 충격
에서 장벽을 칠 때까지 자유 비행 궤적 기간 주어진 초기조건의 설정 기간에 대하여 풀었다. 충격 조건은 단지 충격  이후에 속도를 얻기 위하여 부과된다. 그런 후 이것은 충격 이후의 궤적에 대한 초기조건으로서 취한다. 충격 기간의 시간 지속은 이전에 알려져야만 한다는 것을 주목해야 한다.
이후에 속도를 얻기 위하여 부과된다. 그런 후 이것은 충격 이후의 궤적에 대한 초기조건으로서 취한다. 충격 기간의 시간 지속은 이전에 알려져야만 한다는 것을 주목해야 한다.
Shaw와 Holmes는 충격을 가지고 운동을 유도하는 제한을 가진 주기적으로 강제된 발진기의 간단한 모델을 해석했다. 완전한 플라스틱 충격에 대하여 Shaw와 Holmes는 원형에 정의된 불연속 맵에 의한 시스템 동력학을 나타내었다. 이들은 식 (30)으로 표시할 수 있는 운동 방정식과 그림 6에서 보여주는 시스템을 고려했다.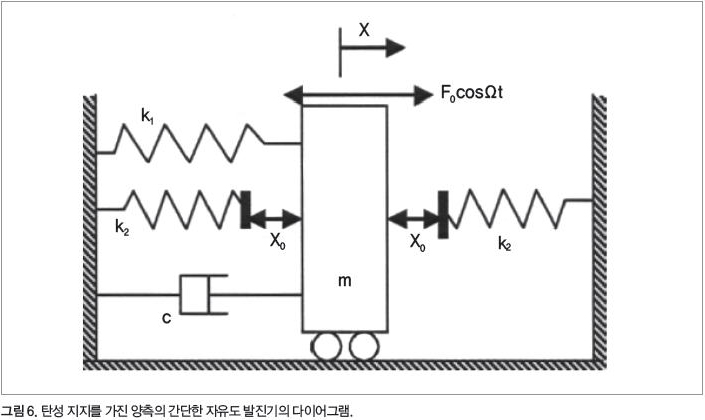
 (30)
(30)
여기서 ‘는 비차원 시간 파라미터  ,
,  ,
,  에 대응하는 미분,
에 대응하는 미분,  는 질량과 스프링
는 질량과 스프링  사이의 갭,
사이의 갭,  ,
,  ,
,  ,
,  (
( <1에 대하여),
<1에 대하여),  (
( ≥1에 대하여), 자유 운동에 있어서 스프링 상수
≥1에 대하여), 자유 운동에 있어서 스프링 상수  를 가진 접촉 기간에 짝수
를 가진 접촉 기간에 짝수  에 대하여
에 대하여  또는 홀수
또는 홀수  에 대하여
에 대하여  이다. 식 (3)은
이다. 식 (3)은  의 두 가지 경우에 대응하는 2개의 수식으로 구성한다. 이중 접촉 운동에 대한 식 (3)의 해석적 해는 Shaw와 Holmes 이후에 식 (31)과 같이 수정되었다.
의 두 가지 경우에 대응하는 2개의 수식으로 구성한다. 이중 접촉 운동에 대한 식 (3)의 해석적 해는 Shaw와 Holmes 이후에 식 (31)과 같이 수정되었다.
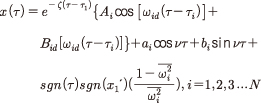 (31)
(31)
여기서
 이다.
이다.
식 (31)은 접촉 영역과 비접촉 영역을 포함한다.  일 때 교차 시간은 이전에 알려지지 않았으며 식 (32)의 2개의 해의 근으로부터 추정되어야만 한다.
일 때 교차 시간은 이전에 알려지지 않았으며 식 (32)의 2개의 해의 근으로부터 추정되어야만 한다. (32)
(32)
시스템 주기 응답의 안정도는  에서 리턴 맵(return map)의 자코비안 고윳값의 평가에 의해 시험될 수 있다. 포엔카레 단면은 식 (33)의 조건을 만족해야만 한다.
에서 리턴 맵(return map)의 자코비안 고윳값의 평가에 의해 시험될 수 있다. 포엔카레 단면은 식 (33)의 조건을 만족해야만 한다. (33)
(33)
여기서  는
는  차 반복 맵이고
차 반복 맵이고  은 서브하모닉 차수이다. 식 (33)은
은 서브하모닉 차수이다. 식 (33)은  에서 충격 이후에 대칭(
에서 충격 이후에 대칭( 충격 운동)과 비대칭 주기 운동 모두를 유지한다. 발진기의 자코비안은 식 (34)와 같다.
충격 운동)과 비대칭 주기 운동 모두를 유지한다. 발진기의 자코비안은 식 (34)와 같다.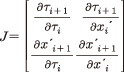 (34)
(34)
이 맵은 임의적으로 긴 초안정 주기 운동이 발생하는 불연속성으로 인하여 천이의 복잡 순차에 의해 이어지는 주기 배증 분기를 가짐을 보여준다. Shaw와 Holmes는 단일 스프링  을 고려했다. 그림 7의 2개의 위상 공간에서 보여주는 강성비
을 고려했다. 그림 7의 2개의 위상 공간에서 보여주는 강성비  에 대하여
에 대하여  와
와  사이에 발생한 분기를 보여주고 있다.
사이에 발생한 분기를 보여주고 있다. 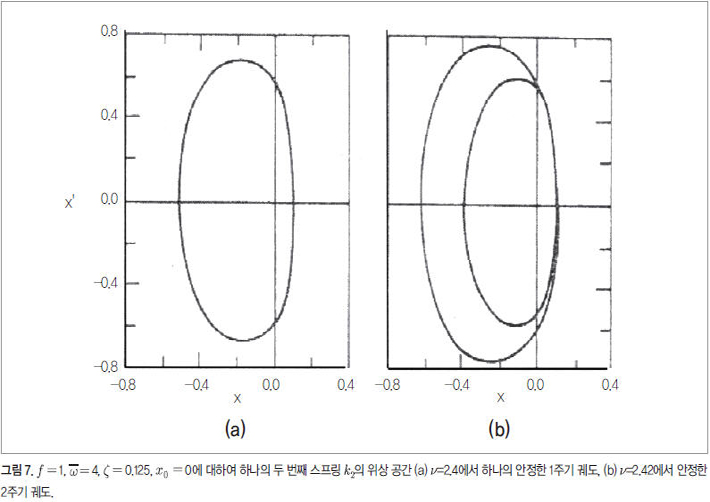
STTT 기법
STTT(Saw-tooth-time-transform)법은 시간의 특수한 변환에 기반하며 고출력 비선형성에 대한 해석적 해들의 명확한 형태를 제공한다.
STTT의 물리적, 수학적 원리들은 많은 연구자에 의해 공식화되었다. STTT 원리들은 선형과 약한 비선형 시스템의 해를 만족하는데 자주 사용해온 삼각 생성 함수  의 큰 확장과 유사하다.
의 큰 확장과 유사하다.
유사하게 상대적으로 간단한 형태를 보이는 비평활 함수의 하나를 고려할 수 있으며 이는 그림 8에서 보여주는 것과 같이  의 일반화된 미분이다.
의 일반화된 미분이다.
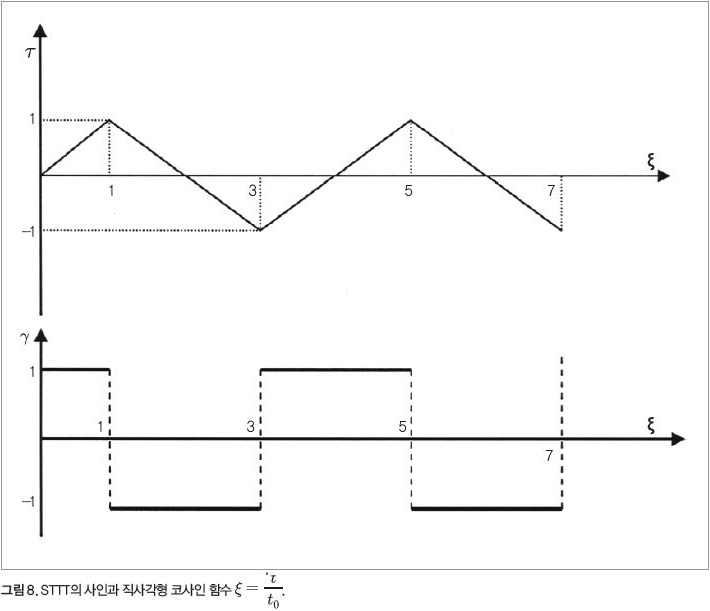
함수  와
와  는 2개의 간단한 진동 모델의 운동 즉, 각각 두 개의 강체 장벽과 질량-스프링 발진기 사이의 입자 운동을 기술한다.
는 2개의 간단한 진동 모델의 운동 즉, 각각 두 개의 강체 장벽과 질량-스프링 발진기 사이의 입자 운동을 기술한다.
이 기법은 식 (35)와 같은 비선형 시스템의 자유 비제동 발진을 고려함으로써 검증될 수 있다.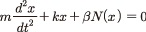 (35)
(35)
여기서  은 시스템의 질량 행렬,
은 시스템의 질량 행렬,  는 선형 강성 행렬,
는 선형 강성 행렬,  는 시스템의 일반화된 좌표 벡터,
는 시스템의 일반화된 좌표 벡터,  는 강한 충격 비선형성을 설명하는 고출력 비선형 항의 벡터,
는 강한 충격 비선형성을 설명하는 고출력 비선형 항의 벡터,  는 양의 상수 파라미터이다. 식 (35)의 주기해는 식 (36)과 같이 쓰일 수 있다.
는 양의 상수 파라미터이다. 식 (35)의 주기해는 식 (36)과 같이 쓰일 수 있다. (36)
(36)
여기서  는 미지의 스케일링 인자로서 주기
는 미지의 스케일링 인자로서 주기  의 1/4과 같으며 자율 사례에 대하여 정의될 수 있다. 따라서 해들은 톱니 함수
의 1/4과 같으며 자율 사례에 대하여 정의될 수 있다. 따라서 해들은 톱니 함수  의 함수로써 구축할 수 있으며, 이는
의 함수로써 구축할 수 있으며, 이는  의 영역에서 변화한다. 식 (35)는
의 영역에서 변화한다. 식 (35)는  의 변환 그룹을 허용함을 주목해야 한다. 이 결과 해들은 기수 함수
의 변환 그룹을 허용함을 주목해야 한다. 이 결과 해들은 기수 함수  을 구축할 수 있다.
을 구축할 수 있다.
식 (36)을 식 (35)에 대입할 때 식 (36)의 미분 기구를 취해야만 하며 등식  로 인하여 식 (37)과 식 (38)과 같이 정리할 수 있다.
로 인하여 식 (37)과 식 (38)과 같이 정리할 수 있다. (37)
(37)
 (38)
(38)
식 (38)의 방정식에서 마지막 항은 디락 델타 함수를 포함하며 식 (37)과 식 (38)을 풀어야만 한다.
이 문제를 푸는 과정은 경계조건을 대입하여 구하는 과정을 포함한다
배영철 전남대학교 공과대학 전기공학과 교수(ycbae@chonnam.ac.kr)