[첨단 헬로티]
최근 ‘부드러운 로봇’이 주목받아 Science Robotic지나 전문지 Soft Robotics에서 논문이 많아지고 있다. 특히 하버드대학, 케임브리지대학 등 지금까지 로보틱스에는 소극적이었던 대학이 중점을 두고 있다. 그러나 부드러운 로봇은 결코 새로운 주제도 아니고, 1960년대 초반부터 일본에서 활발히 연구되고 있었다.
대표적인 연구로는 도쿄대학 생산기술연구소의 모리 마사히로 조교수(당시)의 인공근육이나 도쿄공업대학의 우메타니 요우지 연구실의 뱀 로봇, 전복 로봇, 대장의 연동운동, 그리고 오사카대학 생물공학과 스즈키 료지 실험실의 불가사리 로봇 등이 있다. 대부분은 영어 논문이나 로보틱스의 저명한 국제회의에서 발표됐다. 그러나 시대가 너무 일러 네트워크나 데이터베이스도 없는 시대였기 때문에 인용되지 않았던 것이 많이 아쉽다.

계측자동제어학회가 발족된 지 얼마 되지 않은 때로, 로봇학회도 존재하지 않았지만 당시의 로봇 연구자는 생물물리학이나 신경생리학, 인공장기 등의 연구자와 교류가 활발했다. 새로운 분야의 야심찬 젊은이, 중견 연구자가 소속 학회를 초월해 합숙적인 연구회를 갖고, 공사에 걸친 교류를 지속하고 있었다.
학회가 생기면 장점은 많지만, 주변 분야와 벽이 생겨 교류가 줄어들게 된다. 또한, 2004년 독립법인화 후의 대학은 잡무가 급증한 탓인지, 앞에서 말한 사적인 학제 집회가 급감했다. 의대 공대 연계의 학제 연구는 증가했지만, 학회 전체로서는 아직 부족했다.
이 글에서는 로봇 핸드가 세계적인 추세였던 시기에, 일본에서 과감하게 도전한 소프트 로보틱스 여명기의 연구와 필자 자신의 의료를 위한 소프트 로보틱스군의 연구를 소개하고, 미래 전략을 말한다.
소프트 로보틱스의 분류
현재 정의가 애매한 소프트 로보틱스를 역학적 관점에서 분류하면 아래와 같다.
· 외골격 동물형
· 내골격 동물형
· 연체동물형
1. 외골격 동물형
구성 부품은 강체이지만, 접속부가 유연하고 컴플라이언스 제어적인 효과로 로봇 전체는 유연한 특성을 가진 카테고리이다. 1970년대의 히로세, 우메타니 등의 각종 뱀 로봇. 그림 1, 2의 우메타니, 하타무라, 히시카와 등의 전복 로봇, 그림 3의 80년대 이노우, 우메타니 등의 연동운동 로봇 등이 대표적이다.
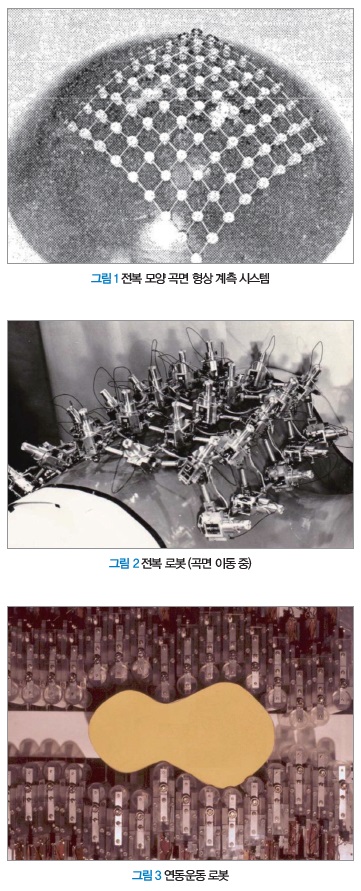
그림 1의 ‘전복 로봇’은 각 소자가 유니버설한 링크로 결합되고, 요철이 있는 국면을 따라 3차원 곡면의 계측을 목적으로 한 수동적인 장치였다. 그림 2는 곡면 계측뿐만 아니라 각 소자 간의 링크가 모터 구동되고, 마치 전복과 같이 진행파를 생성해 3차원 곡면을 미끄러져 떨어지지 않고 유연하게 이동할 수 있었다. 로보틱스 여명기에 대학원생이 설계, 제작한 것이다. NC나 와이어컷 등 자동가공장치를 대학 연구실에서 아직 구입할 수 없었던 환경에서도 충분한 성능을 내고 있는 점도 훌륭하다. 기계계의 학생들이 IT계로 옮겨가고 있는 오늘날에는 쉽지 않은 일이다.
당시의 도쿄공업대학 우메타니 연구실에서는 생물의 이동을 역학, 제어공학의 관점에서 조직적으로 연구해, 그 지식을 참고하면서 카피를 초월한 새로운 발상의 로봇을 고안, 시제작하고 있었다. ‘생물공학(바이오엔지니어링)’의 방법을 강하게 의식, 유럽과 미국에서 주류였던 로봇 핸드나 이미지 인식 등과 차별화된 접근을 채택하고 있었다. 실제로는 이 철학이 오늘날의 유럽과 미국에서 나온 소프트 로보틱스에 영향을 주고 있다.
그림 3은 80년대 동 연구실의 이노우, 우메타니 등에 의한 ‘대장 연동운동의 바이오 메커니즘’을 해명할 목적으로 개발된 2차원 연동기구이다. 장벽의 법선 방향으로만 움직이는 여러 개의 소자가 자신의 좌우 소자와 연동한 신경제어계를 도입한 결과, 자율분산적 제어로 장 내의 물체를 한 방향으로 이동시키는 데 성공했다. 기구의 개발과 병행해 실제 동물의 대장 움직임을 관찰하고, 연동운동의 센싱과 제어의 이론 모델 구축에 공헌했다. 나중에 이탈리아의 피사대학과 캘리포니아공과대학의 탄성튜브 모양의 연동 대장 로봇, 대장의 물리 모델로서 세계적으로 연구됐다.
2. 내골격 동물형
로봇 내부는 강체 부품이나 스프링 등 탄성 부품으로 구성되지만, 바깥측은 유연한 소재로 구성된 로봇. 즉, 내골격형이다. 그림 4에 나타낸 80년대의 이쿠타, 츠카모토, 히로세 등의 형상기억합금(SMA) 구동 방식의 로봇 능동 내시경이 있다.
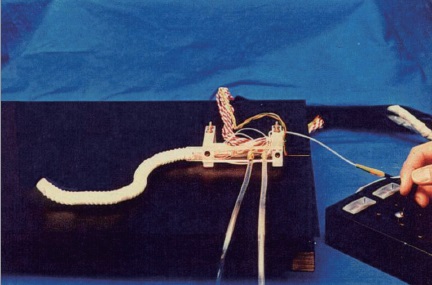
그림 4. SMA 구동의 능동 내시경
이 모델은 5개의 능동 굴곡 몸통이 직렬로 결합, 총 10자유도의 독립된 굴곡운동이 가능하다. 그림 5에 나타냈듯이 1개의 몸통 내부에는 미세한 TiNi 합금제의 SMA 스프링 유닛이 늘어난 상태로 한 쌍 세트되며, 외부에서 통전 가열로 상변태 온도 이상이 된 SMA 유닛이 수축해 굴곡운동을 한다. TiNi 합금의 발생력은 상변태에 기인해 일어나지만 상변태의 내부 상태는 전기저항값 변화로서 센싱할 수 있다는 것을 발견, PWM 통전과 동시에 SMA의 저항값 변화를 계측할 수 있는 회로를 각 SMA 유닛에 설치해 굴곡각 센서가 불필요한 ‘무센서 액추에이터’를 실현했다. 무센서 액추에이터의 연구가 활발해진 것은 훗날이었다.
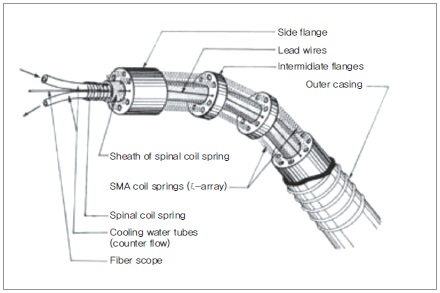
그림 5. 내부 구조 (1관절)
그림 6은 2000년대 초반에 나고야대학 시절의 이쿠타, 야마모토 등에 의해 고안 시제작된 심부 장기의 원격 미세 수술용 유연 세경의 수술 로봇(마이크로 핑거)이다. 직경 2.5mm로 유연한 몸통을 가졌기 때문에 몸 표면에서 심부까지 삽입할 수 있다. 또한, 그림 7과 같이 유연한 위 카메라 내시경(연성경)에서도 내부의 여러 개의 워킹 채널을 따라 삽입시켜 용종 절제보다 난이도가 높은 위나 대장의 점막하 종양을 한쪽의 마이크로 핑거로 들어 올리고, 다른 한쪽으로 절제할 수 있는 것이 동물실험으로 확인됐다.

그림 6. 유연한 원격 미세 수술 로봇 (마이크로 핑거)
이 콘셉트는 직선 겸자를 이용하는 다빈치로는 불가능한 심부의 수술에 대응할 수 있기 때문에 차세대 원격 수술 로봇의 원형으로서 인식되어, 유럽과 미국, 한국, 중국에서 유사한 형태의 로봇이 활발히 개발돼 실용화도 멀지 않았다. 오랫동안 일본의 의료 메이커가 수술 로봇에 소극적이었던 것이 아쉽지만, 의료 기기의 개발 역사에서는 결코 드문 일이 아니다.
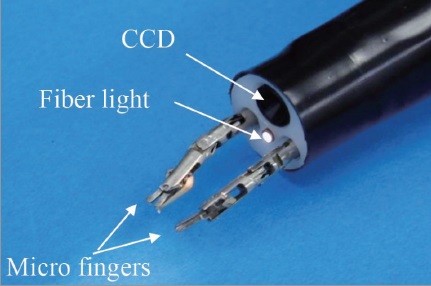
그림 7. 연성 내시경 끝에 미세 수술이 가능한 한 쌍의 마이크로 핑거
유럽과 미국의 의료 기기 라이센스 생산과 판매로부터 창업, 오너 사장이 아닌 것이 리스크를 피하는 경영이 된다고 알려진지 오래다. 의료 분야가 아니어도 기술과 도전 정신이 왕성한 신규 기업의 참여가 기대된다. AMED 등 자금을 제공하는 조직도, 의료 메이커에 한정하지 않고 폭넓게 기술계 기업의 응모를 받는 체제로 하지 않으면 참신한 장치의 실용화는 기대할 수 없다. 신규 참여 기업도 판로에 불이익이 없는 룰을 정비하는 것도 반드시 필요하다.
3. 연체동물형
구성 부품과 로봇 전체 모두 유연. 이것은 지렁이 등 연체동물의 ‘수력학적 골격’이라고 한다. 낙지, 오징어, 지렁이 등의 형태를 모방한 로봇이다. 90년대의 스즈모리 등의 ‘유연한 벨로우즈 소형 공기압 액추에이터’와 그림 8의 이쿠타, 스즈키, 야지마 등의 2000년대의 ‘수압 구동 능동 카테터’로 대표된다.
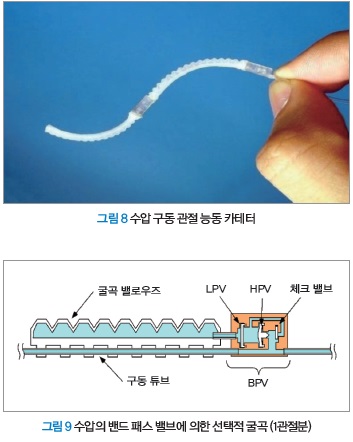
이 능동 카테터는 혈관 내의 누전 리스크를 완전히 회피하고, 또한 기존 카테터에 비해 굽힘강성을 낮춰 혈관과 접하는 부재의 유연성을 높이는 배려를 하고 있다. 필자는 그림 9의 ‘밴드 패스 밸브’를 고안, 1개의 세관 지름 실리콘 튜브로 여러 개의 관절 굴곡각의 독립 제어에 성공했다. 밴드 패스 밸브는 상시 폐쇄의 한 방향 밸브 2개가 직렬로 접속되어 있다. 각각의 밸브는 다른 작동압으로 설정되고, 일정한 압력 범위의 구동압이 부하된 경우에만 오픈돼 굴곡 벨로우즈에 액체(생리식염수)가 유입, 카테터가 굴곡된다.
2개의 굴곡 관절이 직렬적으로 접합되어 있으며, 오픈이 되는 압력 범위를 각각 겹치지 않도록 설계되어 있기 때문에 외부에서 수압을 제어함으로써 각 굴곡각은 독립적으로 실시간 제어할 수 있다. 그 결과 혈관의 분기부에서 진행 방향을 제어할 수 있어, 심부 혈관과 장기까지 안전하고 쉽게 침입할 수 있다. 작은 밴드 패스 밸브는 이쿠타 등이 1992년 세계에서 선구적으로 독자 개발한 하이브리드 마이크로 광조형법을 이용해 연구실 내에서 제작됐다.
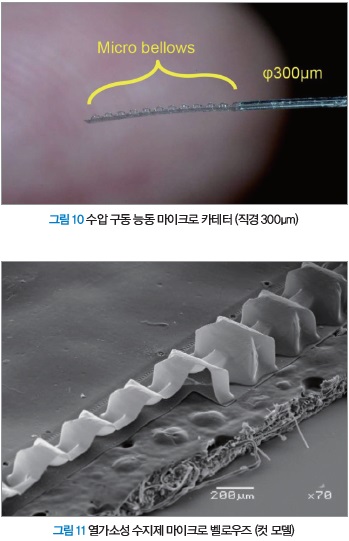
그림 10은 이케우치, 이쿠타 등에 의해 고안 시제작된 외경 300μm의 능동 카테터이다. 이 디바이스는 끝단 1개의 관절뿐이지만, 몸통이 세경이고 유연하기 때문에 모세혈관에도 침입할 수 있다. 소재는 두께 5μm의 박막 폴리머(폴리유산 PLA)로, 굴곡 벨로우즈는 그림 11의 컷 모델에 나타낸 복잡한 입체 형상이다. 이 박막 벨로우즈는 마이크로 광조형법으로 제작한 수놈형에 열가소성의 PLA막을 대어 누르는 핫 엠보스법으로 제작하고 있다.
소프트 로보틱스의 과제
1. 소프트 액추에이터
최근의 소프트 로보틱스는 연체동물형이 많다. 유연한 실리콘 고무제로, 수압․고압 방식이 많다. 이러한 방식의 소프트 액추에이터는 90년대 도시바의 스즈모리(현 도쿄공업대학) 등이 개발한 소형의 유연한 공기압 액추에이터로 시작돼, 2000년대 도쿄공업대학 츠카고시 등이 개발한 막 구조로 구성되는 공수압 구동 액추에이터, 앞에서 말한 당시 나고야대의 이쿠타, 스즈키, 야지마 등이 개발한 수압 능동 카테터가 있다. 최근 하버드대 Whiteside 등이 개발한 대구경 유연 공기압 액추에이터가 사이언스에 게재됐는데, 원리, 기술 모두 신규성은 불분명하다.
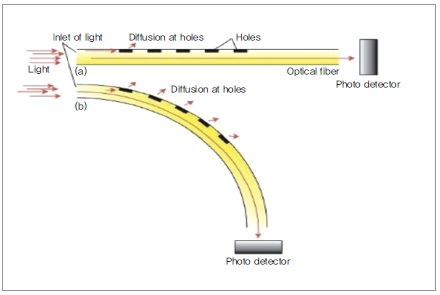
그림 12. 굴곡각 측정용 광학식 소프트 센서의 원리
또한, 새로운 원리의 액추에이터와 유연한 액추에이터의 연구도 다시 활발해지고 있다. 압전 폴리머, 졸겔 가수분해와 새로운 전기화학적 액추에이터의 인공근육. 그리고 도쿄농공대(현 오사카대)의 모리시마 등을 개척자로 해, 최근에는 도쿄대 타케우치 등에 의한 살아있는 배양 근육을 유용한 생체 액추에이터는 흥미 깊다. 습식 환경과 전처리가 필수적이며, 사용 중에 부패되는 등의 기술적 과제가 있기 때문에 원리 검증과 응용 가능성을 추구하고 있는 수준이다.
도쿄대 이쿠타, 사토 등은 폴리유산 등 생분해성 수지를 이용한 마이크로 액추에이터 개발에 성공했다. 체내 삽입형의 마이크로 머신을 일정 기간 구동한 후, 분해 흡수되기 때문에 제거하는 수술이 필요 없는 세계 최초의 새로운 원리의 마이크로 액추에이터이다.
ETH의 Nelson 등은 카테터의 끝에 미세한 자석을 장착하고, 거대한 외부 자장 코일에서 심장 또는 체내을 유도하는 것을 시도하고 있다. 의료 응용에서는 로봇 내부에 액추에이터가 없는 방법도 효과적이다.
2. 소프트 센서
잊어버리기 쉽지만, 연체동물형의 경우는 액추에이터뿐만 아니라 센서도 유연하고 또한 작은 것이 요구된다.
‘소프트 센서’는 지금까지 유기 폴리머 반도체의 박막을 이용한 센서가 하버드, 벨연구소, 도쿄대학 소메타니 등의 그룹에 의해 활발히 연구되어 왔다. 앞으로 소프트 로보틱스에 응용 전개가 기대된다.
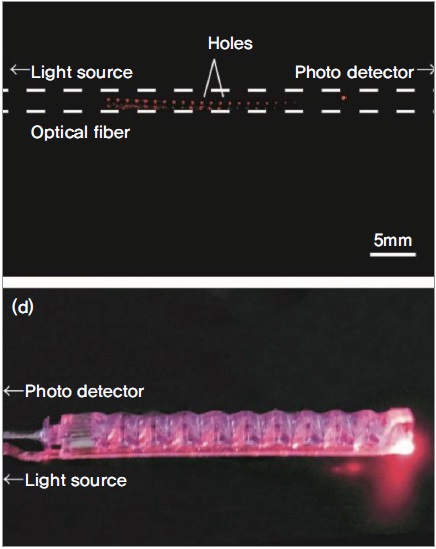
그림 13. 시제작품과 실증실험
다른 접근으로는 도쿄대의 이노우에, 이쿠타 등은 앞에서 말한 지렁이처럼 유연하고 세경의 능동 카테터를 혈관 내에 삽입할 때, 여러 개의 능동 관절의 굴곡각을 실시간으로 또한 안전하게 계측할 수 있는 광학 방식 소프트 센서를 개발해 왔다. 이 센서의 원리는 그림 12에 나타냈듯이 광파이버 표면에 여러 개의 작은 노치를 붙여 둔다. 굴곡시키면 노치 부위로부터 빛이 내비친다. 그 결과, 광파이버로부터 입사광 측에서 반사광의 강도를 계측하면 굴곡각을 계측할 수 있게 된다. 그림 13은 수압 구동 능동 카테터에 접착해 실증 계측하고 있다. 기존의 광파이버를 이용한 굴곡각 계측에서는 몇 킬로나 되는 광파이버와 고정도의 광계측장치가 반드시 필요했다. 이 소프트 센서는 계측계도 포함해 비교가 안 될 정도로 간편하며, 소형 경량의 저코스트 시스템이다.
연구 전략과 장래 전망
소프트 로보틱스를 성공시키기 위해서는 새로운 소재, 새로운 원리의 액추에이터 등 새로운 원리의 메카트로닉스와 생체공학에 대한 이해가 중요하다. 반세기 전의 누군가가 생각해낸 것도 실현 가능한 시대가 됐다. 당연하지만, 개념 수준에서 새로운 연구도 반드시 필요하다.
앞에서 말했듯이 일본에서 60년대, 70년대, 의료공학, 마이크로 로보틱스 분야에서 수많은 개념의 제안과 선구적인 연구가 실시됐다. 역사적으로는 유럽과 미국의 로보틱스는 컴퓨터 사이언스, 화상처리, AI 등 정보계 지능계가 주체였다. 한편, 일본은 메카트로닉스 등 정밀 기계계가 주체였다. 그렇기 때문에 독창적인 요소 기술이 열쇠가 되는 소프트 로보틱스의 기초 연구가 풍부하게 존재한다.
그러나 일본인은 일본인의 연구를 인용하지 않는 경향이 있다. 다른 분야에서도 비슷한 경향이 있기 때문에 일본의 학회 전체에서 의식 개혁이 반드시 필요하다. 예를 들면 일문 논문이라도 존경할 수 있는 연구 성과는 인용해야 한다. 물론 인터넷 검색할 수 있는 논문만 읽고 인용하는 안이한 연구자는 논외이다.
아직 로봇이 학문으로 인정되지 않고 학회조차 존재하지 않았던 시대, 유럽과 미국의 연구에 영향을 받지 않고 독자적인 시점으로 ‘부드러운 로봇’을 탐구한 연구자들의 마음을 상상해 보자. 불안보다는 연구 삼매경에 빠져 개발을 즐기는 여유가 있었다.
필자 등의 능동 내시경도 발표 당시에는 충분히 이해, 평가되지 않았지만, 2018년에 IEEE, ICRA ’88년의 논문에서 ‘30년 동안 가장 영향력 있었던 논문상’을 수상했다. 새로운 상의 신설 목적은 눈앞의 평가와 유행에 휩쓸리지 않고 항상 새로운 세계를 개척하는 자세를 장려하기 위해서이다. 사회 전체가 타인과의 차이를 평가하는 미국에서 제안됐다.
필자도 계속 의료용 소프트 로보틱스, 의료용 디바이스 개발과 사회 실현에 매진하고 싶다.
AAAS 사이언스지의 자매지인 사이언스 로보틱스지에서는 새로운 원리, 새로운 소재, 새로운 콘셉트가 풍부한 논문이 편집자인 과학자의 흥미를 끌어당기는 것도 이유이지만, 기존의 학회지에서는 이단으로 볼 수 있는 논문이 많이 게재되고 있다. 독자 여러분도 로봇 분야 이외의 연구자에게 주지시키는 도구로서 사용해 보는 것은 어떨까.
이쿠타 코우지, 오사카대학, 도쿄대학