
기계공학에서의 비선형 특성 Ⅷ.
이번 글에서는 지난 호에 이어 이동 컨테이너에서의 측면 출렁거림 운동에 대하여 몇 회에 걸쳐 설명한다.
Franklin T. Dodge[1]가 발표한 ‘The New Dynamic behavior of liquids in moving containers(이동 컨테이너에서의 액체의 새로운 동적 거동)’을 중심으로 그 내용을 살핀다.
원형 원통형 탱크
원형 원통형 탱크는 그 형상이 미사일과 우주선 속으로 거의 패키지화할 수 있으므로 많은 응용에 사용되고 있다. 원형 원통형 탱크 속에서 액체가 출렁거림을 가질 경우의 몇 가지 에 대하여 알아본다.
1. 퍼텐셜과 고윳값들
원형 탱크에 대한 출렁거림 속도 퍼텐셜의 미분은 Bauer[2]에 의해 주어졌다. 이들이 원통 좌표에서 식(1)의 적절한 해가 되기 때문에 베셀함수  에 의해 대체되어 사용된 함수와 Bauer 미분의 주요 차이점은 sin과 cos을 사용한다는 것이다.
에 의해 대체되어 사용된 함수와 Bauer 미분의 주요 차이점은 sin과 cos을 사용한다는 것이다.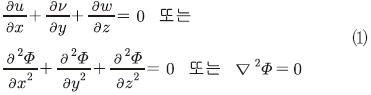
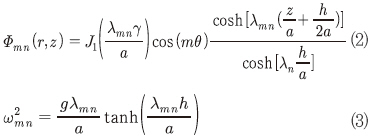
일반적인 고유해들과 고윳값들은 식(2), 식(3)과 같이 주어진다.
여기서  ,
,  들은 방사와 각 좌표이며,
들은 방사와 각 좌표이며,  는 탱크의 반경,
는 탱크의 반경,  은
은  에 대하여
에 대하여
고윳값 함수  의 근이다.
의 근이다.
2. 비대칭 모드
식(2)와 식(3)에서  일 때
일 때  로서 각도 좌표에서 그림 1에서 보여주는 것과 유사하게 반은 상승 반은 하강의 파형이 되도록 퍼텐셜은 변화한다.
로서 각도 좌표에서 그림 1에서 보여주는 것과 유사하게 반은 상승 반은 하강의 파형이 되도록 퍼텐셜은 변화한다.
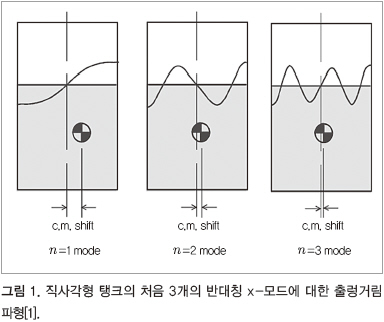
 일 때 파형 형상은 원주 주변에서 몇 개의 하강과 상승을 가지고 있다. 그렇지만 오직
일 때 파형 형상은 원주 주변에서 몇 개의 하강과 상승을 가지고 있다. 그렇지만 오직  모드에서 탱크 위의 전체적인 힘과 토크를 생성한다. 이들은 탱크의 피치와 측면에서 생성된 모드이다. 따라서 모드들은 관심 있는 주요한 것 중의 하나이다. 에 대하여 의 값들은
모드에서 탱크 위의 전체적인 힘과 토크를 생성한다. 이들은 탱크의 피치와 측면에서 생성된 모드이다. 따라서 모드들은 관심 있는 주요한 것 중의 하나이다. 에 대하여 의 값들은  에 의해 표시된다. 의 수치적인 값들은 식(4)와 같다.
에 의해 표시된다. 의 수치적인 값들은 식(4)와 같다.
반대칭 자유 표면파의 형상은  에 비례하며
에 비례하며  에 대하여 이것은 그림 1에서 보여준 것과 같이 기본 sin 파형과 유사하다.
에 대하여 이것은 그림 1에서 보여준 것과 같이 기본 sin 파형과 유사하다.  에 대하여 형상은 대응하는 고차 sin과 닮았지만, 최댓값들과 최솟값들(계곡들)은
에 대하여 형상은 대응하는 고차 sin과 닮았지만, 최댓값들과 최솟값들(계곡들)은  이 증가함으로써 탱크 벽 부근에 더 집중하게 된다.
이 증가함으로써 탱크 벽 부근에 더 집중하게 된다.
3. 힘들과 토크들
다양한 탱크 여기를 위한 힘들과 토크들은 단지 지난 호에 설명한 직사각형 탱크와 같이 속도 퍼텐셜로부터 계산될 수 있다. 그러나 이들은 등가 기계적 모델을 도입함으로써 보다 쉽게 계산할 수 있으며 나중에 설명할 예정이다.
섹터-환상 원통형 탱크
원통형 탱크의 가장 일반적인 탱크는 환상형 탱크의 영역이다. 일반적인 원통형 탱크는 앞에서 설명을 마쳤다. 그림 2는 이 일반적인 탱크 형상을 통한 교차 면을 보여준다.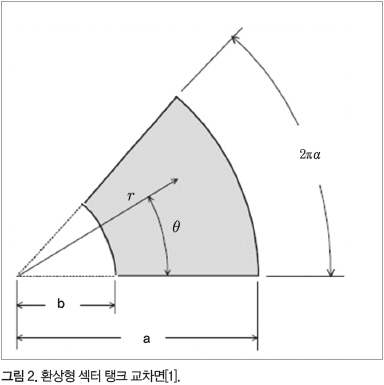
 또는 축 차원은 그림2에 보이지 않는다. 섹터의 폭은 완전한 원의 각도 분수(angular fraction)
또는 축 차원은 그림2에 보이지 않는다. 섹터의 폭은 완전한 원의 각도 분수(angular fraction)  에 의해 정해진다. 환상형의 반경은 에 의해 제공된 탱크의 반경과
에 의해 정해진다. 환상형의 반경은 에 의해 제공된 탱크의 반경과  에 의해 제공한다. 좌표 시스템은 좌표
에 의해 제공한다. 좌표 시스템은 좌표  를 가지는 원통형 시스템이다.
를 가지는 원통형 시스템이다.
이 탱크 기하학에 대한 식(2)의 고유해는 다시 베셀함수[2]를 포함한다. 관심 있는 영역이 완전한 원이 아니므로 분수(fractional) 차수의 베셀함수들이 필요하며 액체 영역이  의 모든 길에 확장되지 않으므로 베셀함수 두 번째 종류의
의 모든 길에 확장되지 않으므로 베셀함수 두 번째 종류의  는
는  와
와  에서 경계조건을 또한 만족하는 것이 필요하다. 대수학은 복잡하지만, 속도 퍼텐셜 고유해들은 식(5)와 같이 주어진다.
에서 경계조건을 또한 만족하는 것이 필요하다. 대수학은 복잡하지만, 속도 퍼텐셜 고유해들은 식(5)와 같이 주어진다.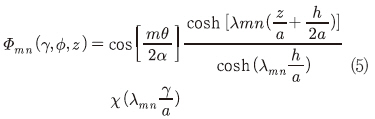
식(5)에서  함수는 식(6)과 같이 베셀함수의 항에서 정의된다.
함수는 식(6)과 같이 베셀함수의 항에서 정의된다.
여기서 ‘는  에 대응하는 미분을 나타낸다. 고윳값 들은 식(7) 방정식의 근이다.
에 대응하는 미분을 나타낸다. 고윳값 들은 식(7) 방정식의 근이다.

 와
와  에서
에서  의 동시조건으로부터 나온다.
의 동시조건으로부터 나온다.
자연 주파수들은 식(8)과 같다.

사분면 탱크( ,
,  )에 대하여 첫 번째 몇 개의 근들은 다음과 같다.
)에 대하여 첫 번째 몇 개의 근들은 다음과 같다. =3.832,
=3.832,  =7.016,
=7.016,  =10.173,
=10.173,  =3.054,
=3.054,  =6.706,
=6.706,  =9.969
=9.969
1. 출렁거림 모드
그림 2에서  <1,
<1,  =0의 섹터 탱크에 대하여 출렁거림 모드들은 탱크의 측면, 피칭, 롤 운동에 의해 여기될 수 있다. 그림 3에서 보여주는 것과 같이 여기에는 중요한 일반적인 2개의 모드가 있다.
=0의 섹터 탱크에 대하여 출렁거림 모드들은 탱크의 측면, 피칭, 롤 운동에 의해 여기될 수 있다. 그림 3에서 보여주는 것과 같이 여기에는 중요한 일반적인 2개의 모드가 있다. 
하나는 반경에 따라 상승과 하강하는 모드를 가지는 것이고 다른 하나는 원주 방향에서 상승과 하강 모드를 가지는 것이다. 이 모드들은 탱크의 원주 확장이 방사상이 큰 것에 의존하는 낮은 자연 주파수를 가진다.
=1, >0의 환상형 탱크에 대하여 반대칭 모드들은 파형 부근 탱크 축 손실의 중앙부를 가지는 원통형 탱크에서 반대칭 모드와 유사하다. 이들 모드들은 탱크 병진과 피칭에 의해 여기될 수 있으며 이들은 탱크상의 토크나 전체 힘을 생성한다.
2. 힘과 토크
힘과 토크에 대한 해석적인 표현들은 매우 복잡하므로 여기에서는 설명하지 않는다.
수평 원통형 탱크
가솔린 탱커 트럭이나 몇몇 미사일들은 필수적으로 수평 원통형 탱크를 사용한다. 그림 4에서 보여주는 것과 같이 출렁거림 모드들은 원통형 세로축이나 가로축에 따라 생성될 수 있다.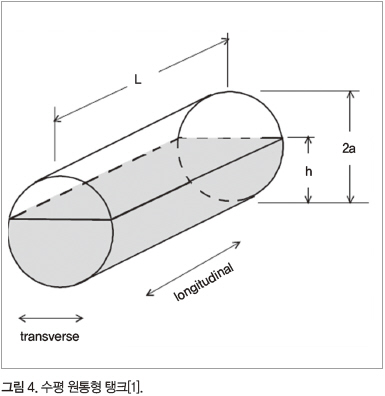
가장 낮은 자연 주파수는 세로축 따라 방향을 가지는 것에 대응한다. (깊이  가 매우 작지 않은 한 횡축 모드는 만약
가 매우 작지 않은 한 횡축 모드는 만약  일지라도 가장 낮은 주파수를 가질 수 있다)
일지라도 가장 낮은 주파수를 가질 수 있다)
지적하는 가장 중요한 점은  일 때의 세로축 출렁거림 모드일 경우인 정지 파형으로서 정지파가 이와 같이 길고 얕은 기하학의 경우에 대하여 불안정하기 때문에 이는 유압 점프와 구멍들과 유사한 진행파에서 변환이 수용 가능 하다.
일 때의 세로축 출렁거림 모드일 경우인 정지 파형으로서 정지파가 이와 같이 길고 얕은 기하학의 경우에 대하여 불안정하기 때문에 이는 유압 점프와 구멍들과 유사한 진행파에서 변환이 수용 가능 하다.
이 불안정성은 비선형 현상이 아니라는 것을 주목하고 진행파의 특성들은 실제로 선형 특성에 의해서 계산할 수 있다. 우수한 근사를 위해서 진행파의 속도는 탱크 길이를 건너선 파형 앞단의 진행 시간과 후단의 시간은 진행파의 주기로서 동일하다. 그러나 탱크의 끝단 위에 다 사용한 힘들은 시간에서 고조파가 아니지만, 충동적인 힘이며 파형이 벽면을 칠 때 큰 값으로 상승하며 파형 전단이 반사된 이후에 거의 0으로 감소한다. 수평 원통형의 형상은 임의의 표준 좌표 시스템 속으로 깔끔하게 맞지는 않는다.
따라서 퍼텐셜은 앞서 설명한 분석에 사용된 변수 분리법에 따라 유도할 수 없다. 대신에 에너지 최소 원리(energy minimization principle)와 변수 계산이 가로축 출렁거림 모드에 대하여 몇몇 제한된 결과를 유도하기 위해 사용되어 왔다[3, 4].
1. 자연 주파수
그림 5는 액체 깊이 비  의 함수로서 3개의 가장 낮은 주파수 가로 모드의 비차원 자연주파수를 보여주고 그림 6은 액체 깊이 비 의 함수로서 세로 모드에 대하여 주파수를 보여준다. 그림에서 차원주파수
의 함수로서 3개의 가장 낮은 주파수 가로 모드의 비차원 자연주파수를 보여주고 그림 6은 액체 깊이 비 의 함수로서 세로 모드에 대하여 주파수를 보여준다. 그림에서 차원주파수  은 rad/sec의 단위를 갖는다.
은 rad/sec의 단위를 갖는다.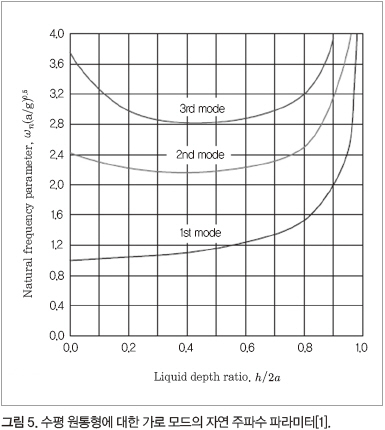
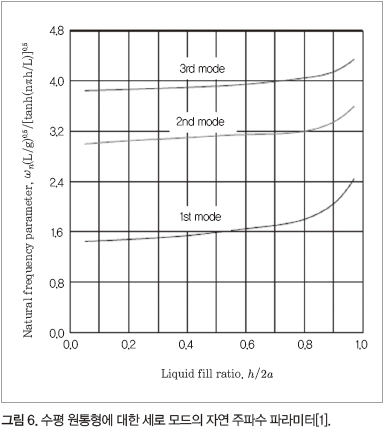
가로 모드 주파수들은 위에서 설명한 이론으로부터 계산된다. 그러나 세로모드 주파수들은 이들 모드들에 대하여 유용한 이론적 결과가 없기 때문에 실험 데이터를 통하여 타당한 간단한 곡선들이다.
2. 근사 기법들
만약 액체 깊이가 너무 낮지 않고 완전하게 차지 않는다면 출렁거림 특성은 근사 절차에 의해 계산될 수 있다. 수평 원통형 탱크는 원통으로서 동일한 길이  , 실제 자유 표면의 폭과 동일한 폭
, 실제 자유 표면의 폭과 동일한 폭  , 원통형 탱크와 동일하게 직사각형 탱크의 액체 체적을 선택하는 액체 깊이 의 크기를 가지는 직사각형 탱크에 의해 대체된다. 예를 들면 반만 채워진 원통형 탱크에 대하여 직사각형 탱크값들은
, 원통형 탱크와 동일하게 직사각형 탱크의 액체 체적을 선택하는 액체 깊이 의 크기를 가지는 직사각형 탱크에 의해 대체된다. 예를 들면 반만 채워진 원통형 탱크에 대하여 직사각형 탱크값들은  =
= 와
와  =
= 이다.
이다.
식(9)에 의해 주어진 직사각형 탱크의 방정식 해의 결과로부터 이를 치환하면 첫 번째 가로 모드에 대한 자연 주파수 파라미터들은 식(10)과 같이 예측된다.
이 값들은 그림 5에서 보여준 1.2의 값으로부터 약간 다를 뿐이다.
3. 힘과 토크들
힘과 토크들은 등가 기계적 모델로부터 계산할 수 있다.
구면 탱크
구면 탱크의 높은 체적 대 하중 비율로 인하여 구면 탱크들은 종종 위성에 사용하고 때때로 발사용 로켓에 사용된다.
1. 자연주파수
그림 7은 최초 2개의 비대칭 모드에 대하여 예측한 자연 주파수를 보여준다. 여기서  는 구면 반경,
는 구면 반경,  는 액체 깊이이며 이는 탱크 아랫부분에서부터 측정한다.
는 액체 깊이이며 이는 탱크 아랫부분에서부터 측정한다.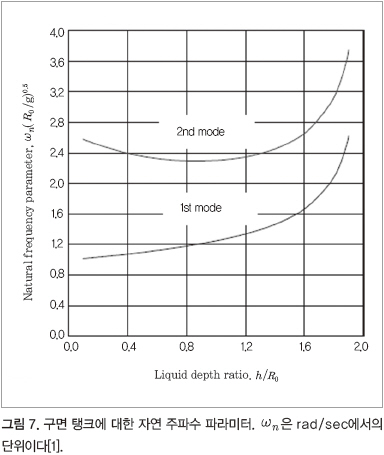
구면 탱크에 대한 1960년대 초 해석적 예측들은 수치적 방법들을 사용하기 위한 결과와 1960년대 컴퓨터의 제한으로 인한 결과로서 특정하게 채워진 레벨에 대하여 만들어졌다[3, 5~9]. 이 결과들을 그림 7에 보여주었다.
자연주파수들은 자유 표면 지름이 작아지기 때문에 높게 채워진 레벨에 대하여 크게 된다. 낮게 채워진 레벨에 대하여 자유 표면 지름 또한 작아지며 식(11)에 따라 이는 을 증가시키고 작은 깊이는  을 감소시키는 경향이 있다.
을 감소시키는 경향이 있다.

그 결과 탱크가 채워진 수준이 0으로 감에 따라 자연주파수는 0이 아닌 값으로 점근해 간다.
2. 힘과 토크들
구면 탱크의 환형 발진은 탱크 운동이 탱크 벽면-액체 계면에 접선이어서 탱크는 단지 액체 주변을 미끄러지므로 이상적인 액체의 출렁거림을 여기하지 않는다.
회전타원체 탱크
회전타원체 탱크들은 우주선에 공통적으로 사용된다. 회전타원체 탱크는 짧은 축이 대칭축인 편구가 되거나 긴축이 대칭축인 장형이 될 수 있다. 그림 8은 편구 회전 타원체 탱크의 기하학을 보여주고 있다.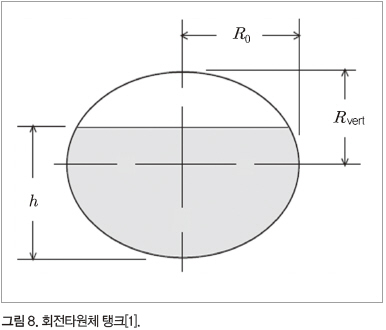
수직축에 따라 아래로 향하는 탱크의 단면은 원이다. 회전 타원체가 중력에 대응하여 배향되는 2개의 방법이 존재한다. 이들 다른 배열들은 축대칭이 아니며 여기서는 설명하지 않는다.
1. 자연주파수
회전타원체의 탱크에 대한 출렁거림 자연 주파수들은 그림 8에서 보여준 대략적인 탱크 형상인 편구 탱크 형상  =
= 에 대하여와 장형 형상 =
에 대하여와 장형 형상 = 를 그림 9에 나타내었다[2,10].
를 그림 9에 나타내었다[2,10].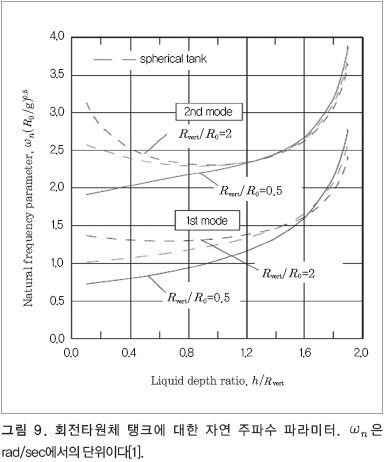
회전타원체 탱크의 이전 결과들은 비교를 위해서 또한 반복되었다. 개략적으로 액체 깊이를 가진 동일한 경향들이 구형 탱크에 대해서 지적한 것이 명백하다. 더욱이 구형과 회전타원체에 대한 자연 주파수들은 탱크가 반 이상 찾을 때 거의 같다.
2. 힘과 토크들
출렁거림 액체에 의해 회전타원체 탱크 위에 소비한 힘과 토크들은 등가 기계적 모델에 의해 계산될 수 있다.
도넛형 탱크
도넛형 탱크는 엔진과 다른 탱크에 적합할 수 있기 때문에 몇몇 로켓 발사체와 우주선에서 제안됐다. 도넛형 탱크들은 또한 냉각 사고를 가정한 손실에서 방출된 증기를 응축하기 위한 몇몇 비등수로형 원자로(boiling-water nuclear reactors)에서 ‘억제 풀(suppression pool)’로서 사용되었다. 초기에는 오직 경험적 데이터와 근사적 해석들이 도넛형 탱크에서 유용하게 사용하였다[11, 12].
1. 자연 주파수
그림 10은 기하학을 표시하는 2개의 반경  와 의 정의와 도넛형 탱크 배영을 보여주고 있다.
와 의 정의와 도넛형 탱크 배영을 보여주고 있다. 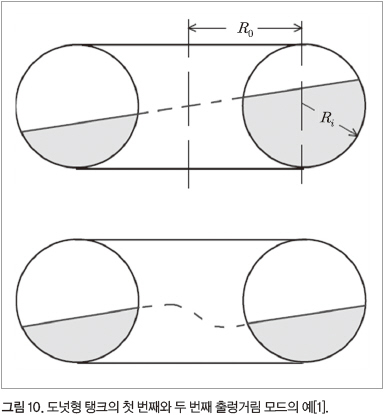
이 그림은 또한 두 개의 가장 낮은 주파수 출렁거림 모드들의 형태를 개략적으로 보여준다. 가장 낮은 주파수 모드에 대하여 탱크의 반에서 액체(그림 10의 오른쪽)가 위로 이동하며 반대 방향의 반은 교대로 반대 방향으로 이동한다. 두 번째 가장 낮은 주파수 모드에서는 액체 운동은 탱크의 두 개의 반과 유사하다. 이 모드의 2개는 탱크 원주 부근에서  로 변화하며 이에 따라 전체 힘과 토크가 만들어진다. 몇몇 반경 비율에 대하여 사실 두 번째 모드는 더 큰 힘의 원인이 된다. 또한 두 개의 모드가 상호작용하는 경향이 존재한다.
로 변화하며 이에 따라 전체 힘과 토크가 만들어진다. 몇몇 반경 비율에 대하여 사실 두 번째 모드는 더 큰 힘의 원인이 된다. 또한 두 개의 모드가 상호작용하는 경향이 존재한다.
축이 수직인 측면에 탱크가 배향될 때 다른 모드들이 존재한다. 이 모드들은 또한 전체 힘과 토크를 생산한다. 이 탱크는 이 배열에 대하여 축대칭이 아니며 일반적으로 응용에서 사용하지 않는다. 이러한 이유로 이 모드들은 여기에서 설명하지 않는다.
그림 10에서 보여준 2개 모드의 비차원 자연 주파수들을 액체 깊이 비율  의 함수로서 그림 11에 보여준다.
의 함수로서 그림 11에 보여준다.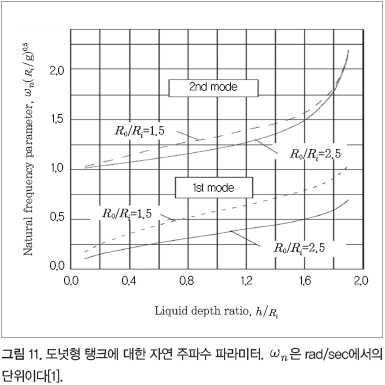
일반적으로 자연주파수는 액체 깊이가 감소할 때 감소하며 상수 소수 반경 에 대하여 주요 반경 의 증가는 자연주파수의 감소 원인이 된다.
2. 근사법
출렁거림 특성을 계산하기 위하여 도넛형 탱크는 앞서 설명한 환상 원통형 탱크로서 근사화시킬 수 있다. 환상형 탱크의 내부와 외부 반경들은 자유 표면의 내부와 외부 가장자리에서의 반경으로 선택할 수 있으며 액체 깊이는 실제 액체 체적을 복사하기 위하여 선택한다.
3. 힘과 토크
출렁거림 액체에 의해 도넛형 탱크 위에 소모한 힘과 토크는 등가 기계적 모델에 의해 계산할 수 있다.
몇몇 실제적 의미
우주 발사체에서 몇 개의 방법들은 액체 출렁거림의 동적 효과를 최소화하기 위해 개발되었다. 다양한 배열의 물 흐름의 조절장치들(baffles)은 출렁거림 힘과 토크들의 진폭을 줄이고 자연 점성 제동을 증가시키기 위해 고안되었다. 만약 출렁거림 주파수의 범위에서 이동을 원한다면 물 흐름의 조절장치들은 상대적으로 덜 효과적이다.
원통형 탱크에 대하여 섹터 속의 칸막이가 기본 출렁거림 주파수와 낮은 제2 주파수를 상승시킬지라도 더 좋은 방법은 탱크를 칸막이 또는 서브 탱크로 나누는 것이다. 이에 따라 2개의 모드는 주파수에서 덜 분리될 것이다. 방사 칸막이는 출렁거림 힘과 토크의 진폭을 줄이는 데서 링 조절 장치만큼 덜 효과적이다.
수직 출렁거림
추진형 탱크(propellant)들은 그림 12에서 보여주는 가로형보다 몇몇 응용에서 트러스트 또는 g-벡터에 따른 진동이 주이다. 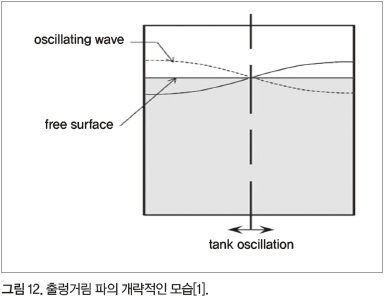
결과로 나오는 출렁거림을 ‘수직 출렁거림’이라 부르며, 이는 파형이 자유 표면에서 정상적인 진동에 의해 직접적으로 여기되지 않기 때문에 파라메트릭 불안정성으로 인한 것이다.
수직 여기는 시변 축 트러스트 가속에 등가이며 따라서 정상 축 가속에 대해서 나타내는 식(12)는 식(13)으로 대체할 수 있다.
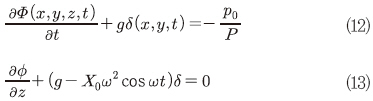
여기서  는 수직 진동의 진폭,
는 수직 진동의 진폭,  는 이것의 주파수이다. 이전으로서 지금 속도 퍼텐셜은
는 이것의 주파수이다. 이전으로서 지금 속도 퍼텐셜은  에 의해 나타나는 적분 상수를 가지는 정상 슬러시 모드의 급수로서 쓰인다고 가정한다. 앞에서 단지 이것은 적분 상수가 식(14)의 비상수 계수를 가진 미분 방정식을 만족하기 위해 선택되어야만 한다고 알았다.
에 의해 나타나는 적분 상수를 가지는 정상 슬러시 모드의 급수로서 쓰인다고 가정한다. 앞에서 단지 이것은 적분 상수가 식(14)의 비상수 계수를 가진 미분 방정식을 만족하기 위해 선택되어야만 한다고 알았다.

여기서  는 탱크 형상에 의존한다. 식(14)는
는 탱크 형상에 의존한다. 식(14)는  와 의 변수에 의존하는 안정한 (
와 의 변수에 의존하는 안정한 ( =0)과 불안정한(>0)을 가지는 Mathieu’s의 방정식이다. 이 해들은
=0)과 불안정한(>0)을 가지는 Mathieu’s의 방정식이다. 이 해들은  에 대하여
에 대하여  의 주파수를 가지고 시작하고 의 주파수 증가를 가진 고조파 급수 가정에 의해 계산된다[13-15]. 이 해는 여기 주파수가 기본 축대칭 모드 즉 1/2 서브하모닉 응답의 자연 주파수의 두 배로 선택할 때 출렁거림이 거의 쉽게 생성된다는 것을 보여준다.
의 주파수를 가지고 시작하고 의 주파수 증가를 가진 고조파 급수 가정에 의해 계산된다[13-15]. 이 해는 여기 주파수가 기본 축대칭 모드 즉 1/2 서브하모닉 응답의 자연 주파수의 두 배로 선택할 때 출렁거림이 거의 쉽게 생성된다는 것을 보여준다.
모드의 진폭은 제동에 의존하며  가 충분히 크지 않는 한 운동이 존재하지 않는다[13].
가 충분히 크지 않는 한 운동이 존재하지 않는다[13].
이 해는 여기가 자연 주파수의 2/3(3/2 서브하모닉 응답) 또는 1/2 자연주파수(2-슈퍼하모닉)와 기타 부근에 있을 때 출렁거림이 만들어질 수 있음을 보여주지만, 실제 액체에 대하여 여기 진폭은 점성 제동으로 인한 이들 모드에 대하여 주목할 만한 출렁거림 진폭을 생성하는데 충분히 큰 것을 가져야만 한다.
배영철 전남대학교 공과대학 전기공학과 교수(ycbae@chonnam.ac.kr)