

로봇 시스템 제어와 응용(3)
이동로봇 시스템 제어와 응용
정슬 충남대 메카트로닉스공학과 교수 (jungs@cnu.ac.kr)
전 호에서는 로봇과 인간의 상호작용에 대해서 다루었다. 이번 호에서는 이동로봇 분야를 다루고자 한다. 이동로봇은 위험한 지역의 탐사나 서비스 로봇의 작업에 사용되고 있다.
최근에는 서비스 로봇 분야에 대한 관심이 높아지면서 다양한 목적의 이동로봇에 대한 연구가 활발하다. 이 글에서는 이동로봇을 기반으로 하는 다양한 용도의 로봇 시스템을 소개하고 제어와 응용에 대해 전개하고자 한다.
이동로봇의 기구학
이동로봇은 무한대의 자유도인 이동성을 가진 로봇으로 우리 생활과 밀접한 관계가 있다. 극한 지역의 탐사뿐만 아니라 병원이나 공장에서의 물품을 운반하고, 가정에서 청소하는 등 다양한 기능을 수행하고 있다[1-7].
일반적인 이동로봇의 기구학은 그림 1과 같이 나타낼 수 있다. X, Y는 전체 좌표를 나타내며 x, y는 로봇 좌표를 나타낸다. 이동로봇에서 제어해야 할 변수는 위치 x, y와 헤딩각도 ø가 된다.
그림 1에서 보면 r은 바퀴의 반지름, L은 바퀴 사이의 거리, Pc는 이동로봇의 무게중심, Po는 양쪽 바퀴 축 중심, d는 무게중심과 바퀴 축과의 최단거리, v는 로봇의 속도, ø는 전체 좌표와 로봇 좌표 간의 각도, 즉 헤딩각을 나타낸다.
먼저 로봇의 속도 v와 각속도 을 구하면 다음과 같다.


여기서 νR=ωRγ, νL=ωLγ는 각 바퀴의 선 속도이다.
로봇의 속도 v를 이용하여 x, y축상의 로봇의 속도를 구하면 다음과 같다.

위의 식 (1)~(4)를 정리하면 로봇의 x, y에서의 속도는 다음과 같다.
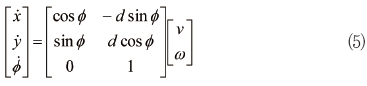
바퀴의 각속도와 로봇의 속도와의 관계는 다음과 같다.
그러므로 식(5)와 식(6)에 의해서 선속도와 각속도는 다음과 같이 구할 수 있다.
여기서 무게중심이 바퀴 중심축의 연장선상에 있을 때, 위의 식 (7)은 d=0이므로 다음과 같다.
이동로봇의 경우 동역학 기반의 제어를 하기보다는 간단히 기구학 기반으로 제어를 수행한다. 그 이유는 이동로봇의 동역학을 유도하는 과정이 복잡한 것에 반해 특성이 간단하기 때문이다.
예컨대, 지면에 놓여 있으므로 중력이 없고 속도가 빠르지 않으면 마찬가지로 콜리오리스힘과 원심력을 무시할 수 있다.
틈새 추종 이동로봇
이동로봇이 도로 보수용으로 사용되는 사례를 살펴보자. 그림 2에 틈새 추종 이동로봇에 대한 개념도가 나타나 있다. 이 로봇은 도로가 갈라져서 생기는 크랙(틈새)을 추종해서 메우는 로봇이다[3].
1. 틈새 추종 이동로봇 구조
그림 3은 실제로 제작된 틈새 추종 로봇을 보여준다. 로봇은 크게 틈새를 검출하는 센서부(검정박스), 로봇 팔을 장착한 작업부(가운데), 그리고 움직임을 제어하는 제어부(후반부)로 나누어진다. 
센서부에서 틈새를 검출하면 제어부에서 틈새를 추종하도록 로봇을 움직이게 되고 작업부에서는 로봇팔이 틈새를 메우는 작업을 하게 된다.
2. 틈새 검출 센서부
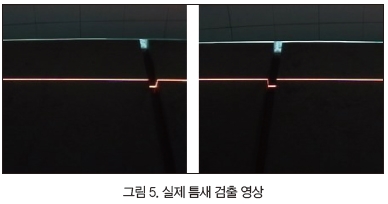
도로의 틈새를 검출하기 위해서는 레이저 센서와 카메라를 사용한다. 먼저 레이저빔을 도로에 주사하면 틈새가 있는 부분에 굴곡이 생기게 되고 그 부분을 카메라로 검출하는 것이다. 그림 4는 실제 검출 환경을 보여주고 그림 5는 실제 검출 영상을 보여준다.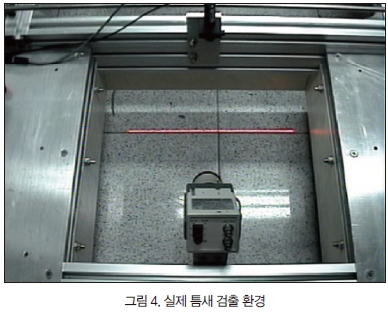
3. 틈새 추종 제어부
영상에서 틈새의 위치를 파악하면 그 정보를 로봇에게 전달해 로봇이 추종하도록 제어해야 한다. 그림 6은 틈새의 위치와 로봇과의 관계를 나타낸다. 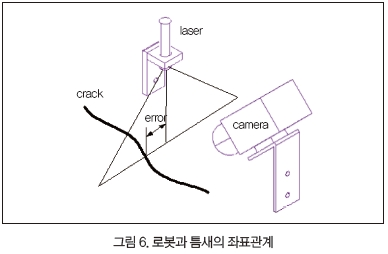
에러(error) 부분을 헤딩각의 오차로 하고 오차를 줄여 가도록 제어기를 설계한다.
각 바퀴의 토크는 다음과 같이 구한다. 로봇은 진행방향을 원하는 속도 Vd로 진행하고 틈새의 방향에 따른 헤딩 각도 오차 øe를 제어한다.
여기서 kd, kp는 제어기 이득값이다.
4. 제어기 성능평가 실험
실내에서 합판으로 가상의 틈새를 만들어 놓고 로봇이 추종하는 실험을 구현했다. 그림 7에서 보면 로봇이 틈새를 잘 추종하는 것을 확인할 수 있다.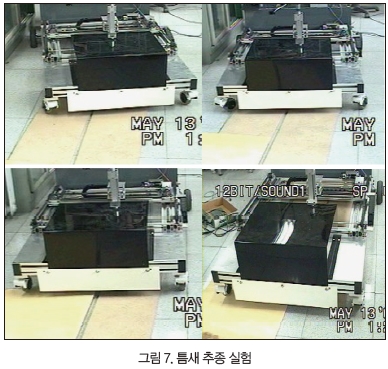
두 바퀴 구동 이동로봇
1. 두 바퀴 구동 이동로봇
최근에 많은 관심을 끌고 있는 이동로봇 중의 하나가 두 바퀴로 구동하는 이동로봇이다. 두 바퀴 구동 이동로봇은 고 난이도의 제어를 학습하는 학술적인 측면뿐만 아니라 일인용 이동수단으로서의 실제 응용적인 측면에서도 매우 유용하게 사용된다. 더욱이 두 바퀴로 구동되는 세그웨이 로봇이 널리 대중에게 알려지면서 이 로봇에 대한 연구가 한창이다[5]. 그림 8은 충남대 ISEE 실험실에서 만든 두 바퀴 구동 복싱 로봇이다. 두 바퀴 구동에서 가장 중요한 것은 균형을 유지하는 것이다.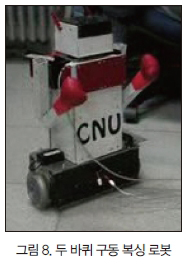
2. 균형각 검출 방법
균형을 유지하기 위해 가장 중요한 것은 센서를 통해 정확한 균형각을 검출하는 것이다. 고가의 센서를 사용하면 정확한 값을 검출할 수 있지만, 이 글에서는 저가의 센서를 융합하여 각도를 검출하는 방법을 논하고자 한다.
균형각의 검출을 위해 자이로 센서와 기울기 센서를 융합해서 사용했다. 자이로 센서는 응답이 빠르지만, 시간에 따라 값이 처지는 드리프트가 발생하고 기울기 센서는 응답이 느린 단점이 있다. 각 센서의 장점을 살린 complementary filter 알고리즘을 사용하여 정확한 각도값을 검출했다[8].
그림 9에서 Ht(s), Hg(s)를 각각 기울기 센서와 자이로 센서의 전달함수라 할 때 다음과같이 Ft(s), Fg(s)를 설정한다.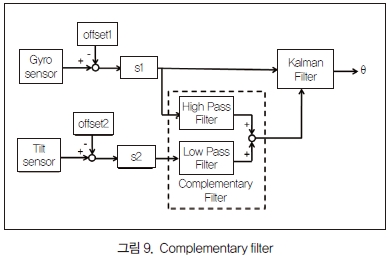

를 식 (11) 과 같이 이상적인 센서로 모델링 했다면,

1차 필터 형태로 Ft(s), Fg(s)를 설정하게 되면 다음과 같다.
형태로 보면 Ft(s)는 low pass filter, Fg(s)는 high pass filter이다.
3. 균형각 검출 실험
그림10과 같은 실험장치를 제작하여 실험했다. 기울기 센서와 자이로 센서를 같이 놓고 모터를 움직여가며 비교적 정확한 엔코더 센서값과 비교했다. 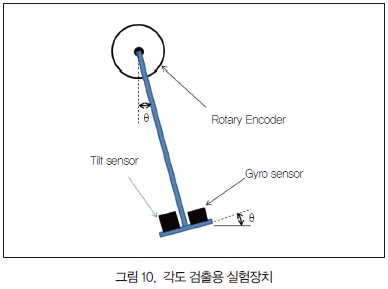
그림 11은 각 센서의 출력을 나타낸다. 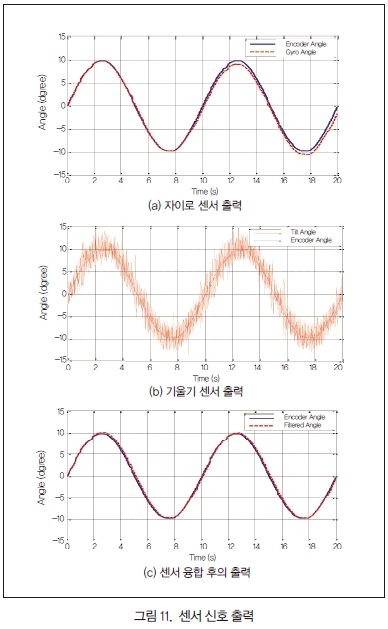
자이로 센서는 시간이 지남에 따라 값이 흐르는 것을 볼 수 있고(그림 11 (a)) 기울기 센서의 출력에는 고주파 잡음이 섞여 있는 것을 볼 수 있다(그림 11(b)).
두 센서의 장점만 고려하는 complemen-tary 필터를 사용한 결과가 그림 11(c)에 나타나 있다. 그림 11(c)에서 보면 센서 융합 후의 신호와 엔코더의 출력을 비교한 것으로 일치하는 것을 볼 수 있다.
4. 제어방법
두 바퀴 구동 이동로봇의 균형과 위치를 제어하기 위해 양 바퀴의 회전과 몸체의 각도에 이동로봇 기구학식(8)을 적용하여 로봇의 위치, 속도, 회전각도, 회전각 속도를 구했다.
기준각도 θd와 각속도 θd는 항상 0도로 하였고, 또한 기준 위치 xmd 설정함으로써 원하는 위치에서 균형을 유지할 수 있도록 했다.

제어블록 다이아 그램이 그림 13에 나타나 있다.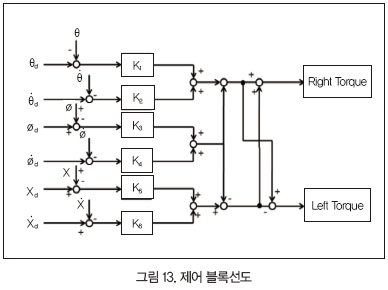
5. 제어기 성능 평가 실험
1) 균형유지 실험
로봇을 무선으로 조정하여 움직임과 균형유지 제어 성능을 확인했다.
그림 14에는 다양한 움직임에서 균형을 유지하는 것을 볼 수 있다.
2) 등판하기
다음 실험으로는 경사진 합판 위를 등판하는 실험을 수행했다. 그림 15는 바닥에서 시작해서 경사진 면을 올라가는 장면을 보여준다[9].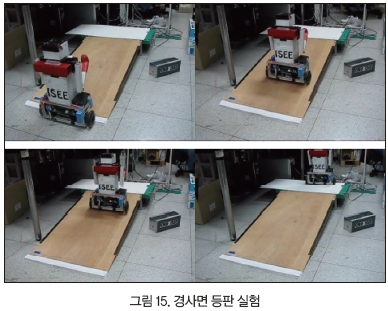
6. 두 바퀴 구동 이동로봇의 응용 사례
위의 실험에서 보듯이 두 바퀴로 안정적으로 주행할 수 있음을 확인했다. 이를 잘 활용하면 흥미를 유발하는 오락로봇에의 응용이 가능하다.
1) 복싱로봇
두 대의 로봇을 이용하여 복싱 경기를 할 수 있다. 로봇을 무선으로 원격제어함으로써 복싱경기를 할 수 있다. 로봇 앞에 부착된 센서 패드를 맞히면 상대방 점수가 내려가게 되므로 점수가 높은 사람이 이기게 된다(그림 16). 
2) 격투경기
좀 더 재미있는 경기는 격투경기이다[11]. 두 바퀴 이동로봇에 휴머노이드 로봇을 탑재하여 4명이 경기를 하는 것이다.
한 팀은 두 명으로 이루어지는데 한 명은 휴머노이드 로봇을, 다른 한 명은 이동로봇을 조종하여 경기한다. 그림 17은 실제 경기장면을 보여준다.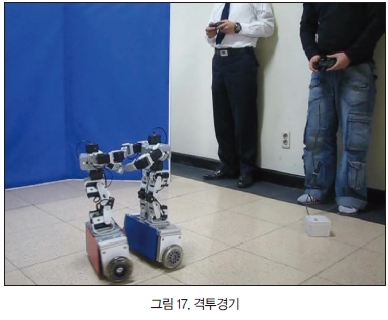
지금까지 다양한 형태의 이동로봇에 대해 살펴보았다. 틈새 추종 로봇의 경우 실제 도로에서는 실험하지 못했지만, 그 성능을 충분히 확인할 수 있었다. 두 바퀴 구동 이동로봇의 경우 정확한 센싱을 통한 고난도의 제어가 필요하고 그 응용이 다양함을 확인했다.