


자주국방을 위한 항법센서 개발현황
MEMS 센서부터 통합 시스템까지 토탈 솔루션 제공
다양한 산업에서 MEMS(Micro Electro Mechanical System) 센서 개발이 활발히 진행되고, 이미 적용되고 있기도 하다. 다소 낯선 분야인 군 항법에서 요구되는 MEMS 센서를 개발하고 있는 기업이 있다. 민수/군수 전 분야에 항법 솔루션을 제공하고 있는 마이크로인피니티 정학영 대표의 ‘자주국방을 위한 항법센서 개발현황’ 주제의 발표 내용을 정리했다.
취재 = 안은혜 기자
항법의 개념과 유도탄

우리나라는 국방비 지출 세계 12위로, 휴전 국가로써 약 34조 3000억 원을 지출하고 있다. 정부 재정 대비 약 14.3%의 비율을 차지하고 있다. 세계 10대 무기 수입국 중에서는 인도, 중국, 파키스탄 다음으로 무기 체계의 수입 의존 비용은 매년 수 조원에 달하여 자주국방을 위한 군수부품과 체계개발이 필요하다.
항법은 넓은 의미로 항체가 움직일 때 유도, 제어 및 측정하는 일련의 과정에 대한 모든 것을 포함하는 학문을 말하며 좁은 의미로는 항체의 위치, 자세, 속도 및 시각 정보를 구하는 기술을 말한다. 항법은 잠수함, 우주선, 비행기, 차량 및 인간 등의 모든 움직이는 물체에 필요하다.
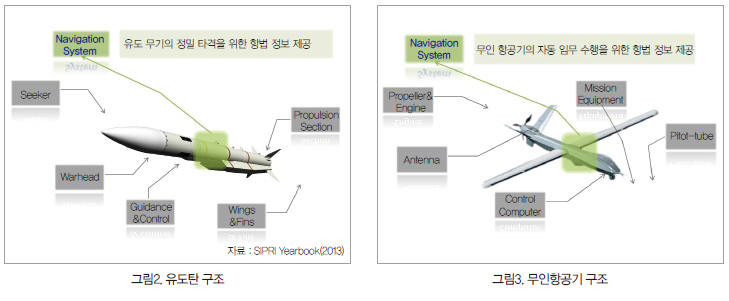
군에서 사용하는 무인항공기는 사람의 조정없이 자율적으로 이동하면서 감시 정찰 임무를 수행한다. 이를 위한 요소장치로는 Mission Equipment, Pitot-tube, Antenna, Propeller & Engine, Control Computer가 있다.
Mission Equipment는 비전(카메라), 적외선 센서 등을 이용한 지상 감시, 정찰 등의 임무를 수행한다. Pitot-tube는 보통 전투기 후두 밑에 뾰족하게 도출되어 있으며, 정압 및 전압 등의 기압 정보를 획득하여 항체의 속도, 고도, AOA(Angle of Attack), Aos(Angle of Sideslip) 등을 측정한다.
Antenna는 지상 통제국과의 통신역할을 수행하고, Propeller & Engine은 무인기의 비행을 위한 동력을 제공한다. Control Computer는 항법 시스템으로부터 항체의 위치, 속도, 자세 등의 항법 정보를 받아 무인기의 자동 비행을 수행하며 목표물의 위치를 인식하기 위해서는 항법시스템으로부터 Mission Equipment의 위치 및 정확한 자세 정보도 필요하다.
항법은 절대위치항법과 상대위치항법으로 크게 나눌 수 있다. 대표적인 절대위치항법은 전파항법 방식의 GPS가 있으며 상대위치항법은 가속도계와 자이로를 이용한 관성항법이 있다.
항법 센서
전파항법 GPS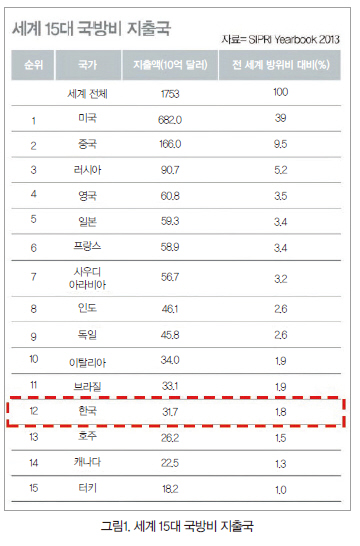
GPS는 Global Positioning System의 약어로 미 국방부에서 개발한 위성을 이용한 전파 항법 시스템이다. GPS 위성에서 송출된 신호를 수신하여 위성과의 수신기 사이의 거리를 측정하고, 삼각측량법으로 사용자 위치를 결정한다.
지구의 24개 위성으로부터 신호를 받아 수신기만 있으면 언제 어디서나 자신의 위치를 구할 수 있는 기술로, 전 세계에서 시간, 기상 등의 제한 없이 사용 가능하다. 하지만 신호의 차단, 다중경로 등의 영향에 의해 지하 주차장, 터널, 건물 내부 등에서는 사용이 불가능하다.
2010년 전까지는 위치 오차가 약 100m 정도이었으나 2010년 이후에는 10m 이내로 급격히 줄었다. 이는 수신기 기술이나 인공위성의 기술이 좋아졌다기보다 미국에서 GPS를 개발한 뒤 적국에서 사용하게 되면 위험하다는 판단으로 일부러 SA (Selective Availability)라는 노이즈를 넣었으나, 클린턴 정부 때 민간에서의 요구로 인해 SA를 없앴기 때문에 오차가 줄게 된 것이다.
그러나 절대위치 오차 10m 이내의 우수한 성능에도 불구하고 재밍, 스푸핑 등 외부영향에 취약하므로 군수 무기에서 단독 사용은 불가능하다.
관성항법 자이로스코프/가속도계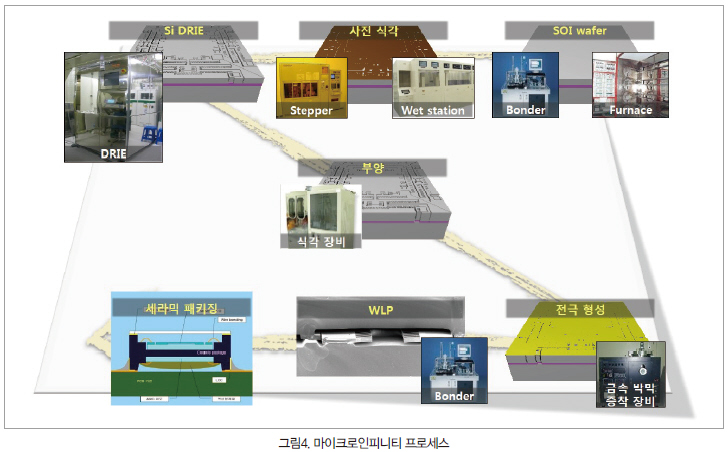
GPS의 단점을 보완할 수 있는 센서로 관성센서가 있는데, 그 중 대표적인 것이 관성항법 장치 INS(Inertial Navigation System)이며 핵심 부품인 자이로스코프와 가속도계로 구성된다. 자이로스코프(Gyroscope)는 그리스어로 ‘회전’이라는 의미의 ‘Gyro’와 ‘본다’는 의미의 ‘Skopein’의 합성어로 ‘회전을 본다’라는 의미이다.
팽이 모양의 자이로스코프는 각속도를 측정하며 날씨, 전파 등의 외부 영향을 받지 않기 때문에 안심하고 사용할 수 있다.
자이로는 각속도를 측정하나 대부분의 경우 각도가 필요한 정보이므로 각속도로부터 각도를 얻기 위해 적분을 해야 하고, 적분을 하게 되면 각속도 정보만 적분되는 것이 아니라 그 안에 들어간 작은 오차도 적분에 의해 쌓이게 된다. 따라서 시간이 지나면서 오차가 증가하게 된다.
자이로 센서의 성능은 주로 바이어스 오차의 크기로 결정된다. 바이어스는 영(zero)이 아닌 값의 편류로 적분 시 오차가 누적되므로 발생하게 된다.
자이로스코프의 성능은 바이어스 오차 크기에 따라 제어급(10deg/hr), 전술급(10~0.003deg/hr), 항법급(0.003deg/hr 이하), 전략급(0.0001deg/hr 이하) 등으로 분류한다. 제어급은 소형 무인기 비행제어를 안정화 시키고, 전술급은 전술급 유도무기(사정거리 1100km)에 해당한다.
항법급은 1nm/hr(nautical mile per on hour) 이내 위치의 오차 항법 장치로, 전투기 및 지상항법 장치이다. 전략급은 사정거리 5500km 이상 ICBM(Intercontinental Ballistic Missiles)을 말하는 것으로 대륙 간 탄도 미사일이나 잠수함에 사용될 수 있다.
자이로스코프는 기계식, 광학식, MEMS(Micro Electro Mechanical System) 등이 있다. 기계식은 질량체가 구동 방향으로 회전 또는 진동을 하고 여기에 회전력이 가해지면 코리올리의 힘에 의해서 검출방향으로 진동을 하는데 이 진동을 검출하여 회전 속도를 검출하는 것이다.
코리올리의 힘을 이용한 기계식 자이로는 DTG(Dynamically-tuned Gyroscope)와 FRIG(Floated Rate Integrating Gyroscope) 등이 있다. 부피가 크고, 고가이면서 고성능(0.001°/h~)의 센서이다.
광학식은 Sagnac effect(사냑 효과)를 이용한 각속도 측정 방식으로 동일궤적을 서로 반대되는 방향으로 빛을 주사하고 회전 시 빛이 도착하는 시간의 차이를 축정하여 각속도를 계산한다. 광학식에는 RLG(Ring Laser Gyroscope), FOG(Fiber Optic Gyroscope 등이 있으며, 중고가이면서 고성능(10°/h~0.001°/h)이다.
MEMS는 기계식과 같이 코리올리 힘을 측정하는 것으로, Bulf, surface, quartz, 압전 등이 있다. 매우 작은 크기로 저가, 저전력이며 저급-중급 성능(~1°/h)을 갖고 있다.
자이로스코프가 방향을 측정하는데 사용된다면, 관성센서의 하나인 가속도계(Accelerometer)는 질량체가 가속도에 반응해서 움직일 때 변화하는 정전용량을 측정하여 검출하는 센서로 INS(Inertial Navigation System)의 핵심 부품이다.
움직이는 변위를 얼마나 세밀하게 측정하는지에 따라 정밀도가 좌우된다. 다만 두 번의 적분으로 위치를 도출하기 때문에 자이로스코프와 유사한 원인으로 바이어스 및 환산계수 오차 성분이 존재한다.
기타 센서
Magnetometer는 자기 선속의 변화가 기전력을 발생시키는 패러데이 전자기 유도 법칙을 이용한 센서로 지구 자기장을 이용하여 자북을 측정하고 편각을 보정하여 방향을 구한다. 자기장을 이용하여 위치도 측정할 수 있다. 하지만 여러 가지 오차가 존재한다.
가까운 곳에 쇠붙이가 있으면 자석이기 때문에 그쪽으로 방향이 틀어지고, 바닥에 전선이 있으면 자기장이 발생해서 실내에서는 사용하기 매우 어렵다. 그러나 주위환경의 영향이 적은 공중에서는 오차를 보완한다면 용이하기 때문에 중요한 센서라고 할 수 있다.
환경적인 요인으로는 외부 자장의 영향을 많이 받고, Hard iron 효과는 자력계 출력에 편향 오차를 유발, Soft iron 효과는 자력계 환산계수 오차에 영향을 받는다.
그밖에 다른 센서로는 공압, 수압 등을 측정하는 압력 센서가 있다. 비행체는 비행할 때 피토튜브(Pitto tube)를 통해 정압과 전압을 받는다. 압력 센서에는 비행 방향과 수직된 방향의 압력(정압)을 측정, 고도를 감지하는 정압 센서와 비행 방향의 압력(전압)을 감지, 전압-정압 차로 속도를 감지하는 차압 센서가 있다.
마지막으로 초음파 혹은 레이저의 Doppler 효과(파동을 발생시키는 파원과 그 파동을 관측하는 관측자 중 하나 이상이 운동하고 있을 때 발생하는 효과)를 이용하여 속도 및 거리를 측정하는 초음파/레이저 센서가 있다.
마이크로인피니티의 사업 내용
마이크로인피니티는 군수용 MEMS 자이로/가속도계 관성센서와 이를 이용한 항법 장치 INS (Inertial Navigation System)를 개발하고 있다. INS는 움직임을 측정하는 IMU (Inertial Measurement Unit)와 항법연산을 수행하는 항법컴퓨터로 구성된다.
IMU는 3차원에서 항체의 움직임을 측정할 수 있도록 자이로 센서 3축 가속도계 3축으로 구성된다. IMU 개발은 센서 설계→센서 제작→각 센서에 대한 신호처리 회로 구현→온도 및 기타 보상을 통한 교정→교정 결과를 검증하는 시험 평가의 과정으로 진행된다.
마이크로인피니티의 센서를 제작하는 과정(MEMS 구조 만드는 공정)은 그림4와 같다.
마이크로인피니티는 소형화, 경량화 모델의 IMU를 준비 중에 있다. 중요한 과정 중 하나인 관성 측정기의 성능을 테스트하고 평가하기 위해 FMS(Flight Motion Simulator)로 바이어스, 환산계수, 안정도 등을 평가한다.
이 외에도 Angular Vibrator는 회전 진동 성능 평가와 대역폭 평가에, Linear Vibrator는 진동과 충격 성능 평가, 대역폭 평가에 사용한다.
또한, Helmholtz coil은 자기장 영향성 평가에, 고가속 시험기로는 구심력 영향성을 평가하는 등 IMU 국산화 개발 및 시험/성능 평가를 위한 고가의 시험 장비 구축을 완료한 상태이다.








































