


LED 스트링 구동용 DCM 부스트 컨버터 분석
고정 주파수 부스트 컨버터는 정전류 모드에서 LED 스트링을 구동하는 데 적합하다. 여기서는 우선 불연속 전도 모드(DCM) 부스트 컨버터의 고전적인 소신호 모델을 사용하기보다는 해당 컨버터의 출력 전류 수식을 기반으로 한 단순화된 접근 방법이 사용된 이론적 분석에 대해 살펴보고, 구현된 솔루션과 측정 정확성, 이론적인 도출값을 비교 검증하여 실질적으로 고려해야 할 사항에 대해 알아본다.
이론적 분석
불연속 전도 모드(DCM)로 동작하는 고정 주파수 부스트 컨버터는 고속 디밍 동작에 효율적으로 사용될 수 있으며, 연속 전도 모드(CCM)로 동작하는 대응 제품보다 우수한 과도 응답을 제공한다. DCM 동작은 LED가 켜질 때 출력 콘덴서의 재충전을 위한 빠른 과도 성능을 가능케 함으로써 LED의 아날로그 디밍을 최소화시켜 준다.
DCM 부스트 컨버터를 적절하게 안정화시키기 위한 소신호 모델들이 존재하기는 하지만, LED를 구동하는 부스트 컨버터의 교류 분석은 표준적인 저항성 부하를 이용한 분석과는 다르다. 직렬 다이오드는 직류 및 교류 부하 조건을 모두 도입하므로 최종적인 전달 함수를 도출하기 위해서는 신중을 기해야 한다.
LED 스트링에 전력을 공급하는 부스트 컨버터
그림 1은 LED 스트링을 구동하는 간소화된 고정 주파수의 피크 전류 동작 부스트 컨버터를 나타낸 것이다. 출력 전류는 감지 저항 Rsense에 의해 영구적으로 모니터링된다. 여기서 발생하는 전압은 제어 회로에 의해 파워 스위치의 ON 시간을 영구적으로 조정함으로써 일정한 LED 전류 Iout을 제공하게 된다. 이것이 제어 출력 변수이다.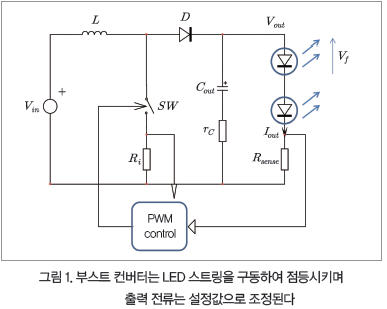
LED 스트링 점등 시 그 연결 단자 양단에 전압이 생성된다. 이 전압은 개별 LED 기술 관련 스레숄드 전압 VT0와 그 동적 저항 rd에 의해 좌우된다. 따라서 LED 스트링 양단의 총 전압강하는 누적 스레숄드 전압값인 VZ라고 적으며, 동적 저항 rLEDs는 직렬 동적 저항들의 합계를 보여준다. 그림 2는 채택된 등가 회로이다. 스트링 전압 강하와 그 총 동적 저항의 특성을 분석하는 일은 독자의 몫이 될 것이다.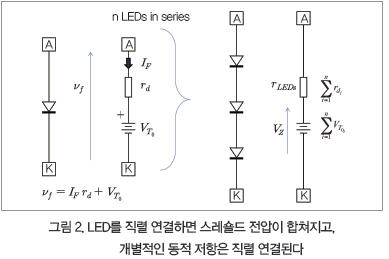
이를 측정하기 위해 LED 스트링을 그 공칭 전류인 IF1으로 바이어스 시킨다. 일단 LED 열 안정성에 도달하면 LED 스트링 양단의 총 전압강하 Vf1을 측정한다. 전류를 약간 더 낮은 값인 IF2로 바꾼 후 새로운 전압강하 Vf2를 측정한다. 이 값에서 다음과 같이 총 동적 저항을 계산할 수 있다.
 (1)
(1)
“제너” 전압은 다음과 같이 스트링 전압 Vf1에서 rLEDs를 뺀 값에 이 측정 지점에서의 전류를 곱한 값이다.
 (2)
(2)
이 LED 스트링을 100mA의 전류로 바이어스 시킨다고 가정해 보자. 측정된 총 전압강하는 27.5V이다. 전류를 80mA로 낮추면 새로운 전압강하는 26.4V가 된다. 총 동적 저항은 다음과 같다.
 (3)
(3)
식 (2)에서 제너 전압은 다음과 같다.
 (4)
(4)
그림 1을 다시 보면, LED 스트링이 감지 저항 Rsense와 직렬로 배치되어 있다. 따라서 총 ac 저항은 다음과 같이 두 요소의 합이 된다.
 (5)
(5)
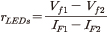
등가의 dc 다이어그램은 그림 3과 같이 상당히 단순화된다. dc 출력전압 Vout은 저항 Rac를 순환하는 출력전류 Iout에 제너 전압을 더한 값이다.
 (6)
(6)
ac에서는 제너 전압이 일정하므로 수식은 다음과 같이 단순화된다.
 (7)
(7)
단순화된 모델
전류원은 사실 입력 소스에서 출력으로 손실 없이 전송되는 전류를 나타낸다. 이 소스는 제어 전압 Vc에 의해 커지거나 작아지는데, 이 제어 전압이 인덕터 피크 전류를 매 사이클마다 설정한다. 컨트롤러는 부스트 컨버터 스위치 전류 감지 저항 Ri를 통해 인덕터 피크 전류를 관찰함으로써 작동한다. Ri 양단의 전압과 제어 전압 Vc가 일치하면 전력 스위치는 꺼지도록 지시 받는다.
ac 다이어그램을 고려한다면 콘덴서와 그 기생 요소가 그림 4와 같이 표시된다. 제너 요소만으로는 아무런 역할도 하지 않는데, 그것은 ac 변조가 이루어지는 동안 그 전압이 일정하게 유지되기 때문이다. 동적 저항 rLEDs만이 식 (5)와 같이 Rac에 포함된다.그림 4에서 제어 전압이 변조될 경우의 소신호 출력 전압 수준을 식으로 나타낼 수 있다.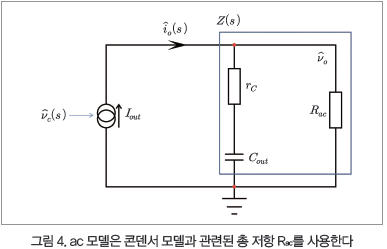
 (8)
(8)
앞서 언급했듯이, 전류원의 값은 제어 및 출력 전압에 의해 좌우된다. 소신호 등가 모델을 도출하기 위해 제어 전압 Vc 및 출력 전압 Vout과 관련하여 Iout의 편도함수를 추출한다. 사본_1.JPG) (9)
(9)
식 (9)를 이용하면 식 (8)을 다음과 같이 다시 쓸 수 있다.
 (10)
(10)
참고문헌 [1](등식 1-111, p.49)에서는 DCM 부스트 컨버터의 dc 전달함수를 다음과 같이 도출했다.
 (11)
(11)
이 수식에서 컨버터에 로딩되는 저항을 Vout/Iout으로 대체해야 하며, 그렇게 하면 새로운 수식은 다음과 같이 된다.
 (12)
(12)
이 식으로 듀티비 수식과 제어 전압 Vc를 도출해야 한다. 보상 램프(Compensation Ramp)가 있을 경우 제어 전압은 더 이상 고정된 dc 전압이 아닌 램프로서 그 슬로프는 최종적인 피크 전류 지점에 영향을 미치게 된다. 그림 5는 그로 인한 파형을 나타낸 것이다. 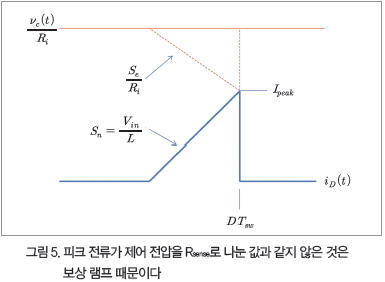
피크 전류 값은 마치 전류제어 감지 저항 Ri를 인위적으로 증가시킨 것처럼 램프가 없을 때보다 빠르게 도달된다. 이는 연속 전도 모드(CCM)에서 전류제어 루프 이득을 감소시키고 양극들을 댐핑시키는 효과가 있다. 컨버터가 DCM으로 전환해도 램프는 여전히 존재하므로 이것을 고려해야 한다. 그 식은 식 (13)과 같은데, 외부 램프 Se가 전압 램프이므로 계수 인자 Ri를 고려했다.
 (13)
(13)
인덕터 전류 슬로프가 수반되는 유사한 수식은 다음과 같이 도출된다.
 (14)
(14)
이것을 D에 대해 풀면 다음과 같다.
 (15)
(15)
이 식을 식 (12)에 적용하여 Iout을 구하면 다음과 같다.
 (16)
(16)
소신호 값을 구하기 위해 식 (10)에서 설명한 대로 제어 전압 Vc와 출력 전압 Vout에 대해 Iout 편도함수를 계산하면 다음과 같이 된다. (17)
(17)
 (18)
(18)
이 식은 vc의 소신호 변조가 출력 전류에 미치는 영향의 특징을 보여준다. (19)
(19) (20)
(20)
이 식은 전류가 전압에 전도도 g의 크기를 갖는 계수를 곱한 값에 좌우된다는 것을 나타내며, 그림 6과 같이 전압제어 전류원이다. 전류 방향은 식 (20)의 음의 부호 때문에 역전된다. 따라서 이것은 양단에 걸리는 전압에 의해 구동되는 전류원이므로 저항일 수 밖에 없으며, 다음과 같이 정의된다.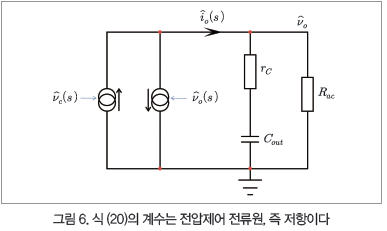
 (21)
(21)
이 단순화된 도출식에서, 전류원은 입력 소스에서 흡수되어 출력으로 전송되는 에너지를 보여준다. 전류원 수식에는 컨버터의 동작 모드와 관련된 정보가 포함되어 있지 않다. 예를 들어 식 (16)만 보고서는 이 부품이 고정 주파수에서 동작하는지, 혹은 작동 시간이나 비작동 시간에 에너지를 출력 부하로 보내는지 등의 여부를 알 수 없다. 이와 같은 정보가 없기 때문에 RHPZ(Right-Half-Plane Zero)와 같은 일부 2차 기여 요소들이 가려져 안 보일 수 밖에 없다. 그러나 우리가 이전의 분석에서 알고 있는 것은, DCM 동작에 RHPZ가 여전히 존재하기는 하지만 이것이 고주파로 밀려나므로 이 경우 그 존재를 제외시킬 수 있다는 것이다.
이처럼 단순화된 접근 방법의 이점은 대략적인 모델을 신속하게 도출할 수 있다는 것인데 이는 해당 구조의 저주파 동작, 즉 dc 이득과 pole/zero 조합을 알려준다. 한 가지 대안은 DCM 전류 모드 부스트 컨버터의 소신호 모델을 이용, 그림 4의 요소들로 이루어진 부하로 완전한 분석을 수행하는 것이다. 이것은 정확한 결과를 제공하겠지만, 보다 많은 반복 작업과 복잡한 등식들을 요구하게 된다.
완전한 AC 모델
이제 모든 계수들을 도출했으므로 원래 그림 4에 나타났던 모델을 업데이트할 수 있다. 업데이트된 스키매틱은 그림 7과 같다. R1은 식 (20)의 계수에 상응하며 출력 전압 변조에 정비례하는 전류를 유도한다. 해당 전달함수 vo/vc를 도출하기 위해 전류원이 로딩되는 임피던스 Z를 살펴봄으로써 회로를 간소화해 보면 다음과 같이 정의된다.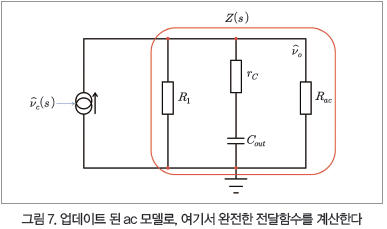
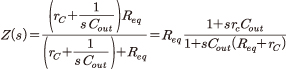 (22)
(22)
식 (22)에서 Req는 Rac와 R1의 병렬 연결이다.
 (23)
(23)
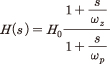
따라서 완전한 전달함수의 경우 식 (18)에서 주어진 계수에 식 (23)의 저항이 곱해진 뒤, 식 (22)의 pole/zero 조합이 뒤따르게 된다.
 (24)
(24)
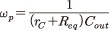
여기서, 다음과 같은 식이 나온다.
 (25)
(25)
 (26)
(26)
 (27)
(27)
동작 지점 도출
ac 함수를 그려 내기 전에 동작 지점과 출력 전류의 제어 전압 Vc에 대한 의존성을 수식화 할 필요가 있다. 이 때 출력 전압은 다음과 같이 된다.
 (28)
(28)
이 정의를 식 (12)에 치환하여 넣을 수 있다.
 (29)
(29)
이 수식에서 Iout을 풀어보면 식 (30)과 같다.
 (30)
(30)
듀티비 D도 식 (15)의 해당 수식으로 대체할 수 있다. 이 경우, 출력전류 수식은 복잡하지만 유용한 수식이 된다.
 (31)
(31)
이 수식에서 LED 스트링의 전압 VZ와 그 동적 저항 rLEDs를 알게 되면 부스트 컨버터가 제공하는 전류를 예측할 수 있다. 이 수식을 실질적인 예제로 검증해 보자.
실제 응용 예
계산 결과들을 점검하기 위해 다음 값들을 사용한다. 이것은 22V의 LED 스트링에 정전류를 제공하는 DCM 부스트 컨버터이다.
L=3.3μH
Tsw=1㎲
Ri=250mΩ
Cout=2.2㎌
rC=4mΩ
Rsense=11Ω
rLEDs=55Ω
Vin=12V
Se=100kV/s
VZ=22V
이 전류를 도입하기 위해 제어 전압 Vc가 400mV라고 가정하자. 그러면 식 (15)를 이용하여 듀티비를 계산할 수 있다.
 (32)
(32)
출력 전류는 식 (31)에서 얻을 수 있다. (33)
(33)
다음으로 출력 전압도 바로 얻을 수 있다.
 (34)
(34)
식 (21)에서 계산된 여분의 저항 R1은 다음과 같다.
 (35)
(35)
이것이 Rac와 병렬로 놓이면 식 (23)에 따라 Req로 된다.
 (36)
(36)
우리는 이제 정적 이득 H0를 계산할 수 있다.
 (37)
(37)
pole과 zero는 다음과 같이 도출된다.
 (38)
(38)
 (39)
(39)
SPICE 시뮬레이션을 실행하여 바이어스 지점들의 타당성을 점검할 수 있다. 여기서는 참고문헌 [1], p.161에서 도출된 대신호 자동 토글링 전류 모드 모델을 사용했다.
그림 8은 그 스키매틱과 표시된 바이어스 지점들을 나타낸 것이다. 이 스키매틱에서 올바른 동적 저항과 동작 전압을 얻기 위해 완벽한 제너 다이오드의 동작을 보여주는 간단한 션트 레귤레이터를 사용했다. 이 완벽한 다이오드는 22V의 항복전압 VZ를 보여주는데, 동적 저항은 55Ω이다.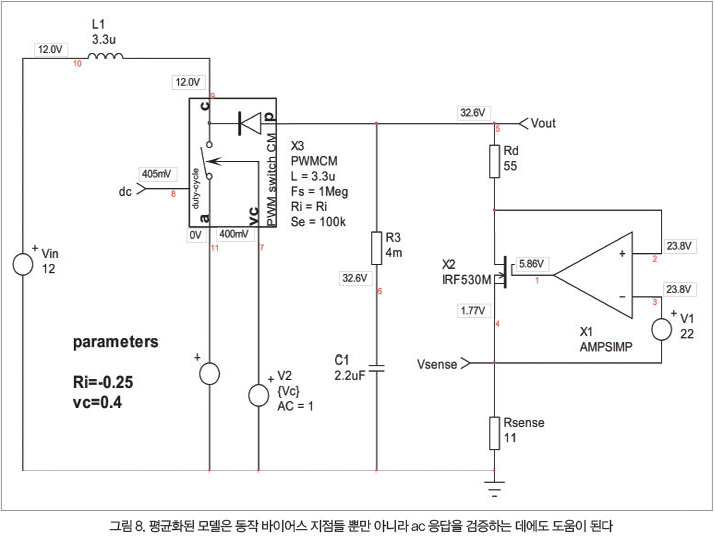
간단한 22V dc 소스도 ac 분석에 사용할 수 있지만, 스타트업과 같은 동적 시뮬레이션에는 사용할 수 없다는 점에 유의해야 한다. ac 스윕을 실행할 경우, SPICE는 회로는 동작 지점을 중심으로 선형화됨으로써 소신호 모델을 생성한다. 스키매틱에 표시된 결과들은 이론적 분석을 통해 얻은 결과와 크게 다르지 않다. 0.4V의 제어 전압을 가진 감지 저항의 전류는 1.77/11≈161mA로 식 (33)에서 계산된 값에 가깝다.
플랜트 Bode 선도는 그림 9와 같다. dc 이득은 식 (37)에서 계산된 값에 가까우며, pole은 올바른 위치(1.6kHz)에 있다. 위상이 계속 떨어지는 것은 고주파 대역에 위치한 고주파 RHPZ 때문이다. 단순화된 접근 방법으로는 이 RHPZ의 존재를 예측할 수 없다. 그 존재는 토폴로지 배열과 관계가 있다. 즉, 부스트 컨버터가 먼저 작동 시간에 소스 에너지를 인덕터에 저장한 뒤 Off Time 동안 이를 부하로 넘겨 버리는 것이다.
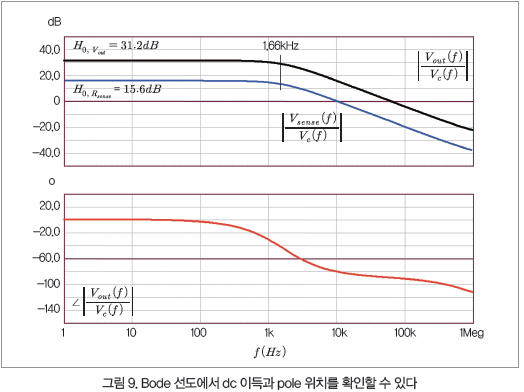
모든 부하 상태의 변화, 즉 출력 전류 증가는 먼저 인덕터 전류를 통해 상승된 뒤 출력으로 전달되어야만 한다. 이 동작 모드에 본질적으로 내재될 수 밖에 없는 이같은 지연은 RHPZ를 통해 모델화된다. 이 에너지 전달 지연은 전류를 제어 전압 Vc와의 관계로만 간단하게 정의하는 식 (16)의 경우 명시적으로 나타나지 않는다. 그러나 DCM에서는 식 (38)에서 정의된 LHPZ(Left-Half Plane zero)가 동작 주파수 Fsw보다 훨씬 높은 주파수에서 발생한다.
우리는 LED 전류를 실제로 조절하고 있는 동안에 출력 전압을 분석했다는 점에 유의해야 한다. 감지 저항 Rsense 양단의 전압을 관찰할 때, 피드백 신호는 Vout의 신호를 rLEDs와 Rsense에 의해 얻은 분할비율로 축소시킨 것이다. 축소 조정값은 다음과 같다.
 (40)
(40)
이 곡선은 또한 그림 8과 같이 나타낼 수 있다.
지금까지 LED 스트링을 구동하는 부스트 컨버터의 소신호 응답 도출에 대해 설명했다. DCM 부스트 컨버터의 포괄적인 소신호 모델을 구현하기보다는 불연속 전도 모드에서 동작하는 LED 부스트 컨버터의 1차 응답을 기술하는 간단한 등식을 도출했다. 1차 함수에 내재된 한계에도 불구하고 몇 줄로 얻어지는 대답은 제어 루프를 안정화시키는 데 충분하다. 다음에는 구현된 솔루션에 대해 살펴보고 실증적인 결과와 이론적인 도출값을 비교 검증한다.
참고 문헌
[1] C. Basso, “Switch Mode Power Supplies: SPICE Simulations and Practical Designs”, McGraw-Hill 2008, ISBN 978-0-07-150859-9
실질적인 고려사항
지금까지는 LED 스트링을 구동하는 부스트 컨버터의 이론적 분석에 집중했다. 이 연구가 시행된 이유는 자동차 애플리케이션에서 백라이트 드라이버의 루프를 안정화시켜야 했기 때문이었다. 디밍 제어를 위해 펄스폭 변조(PWM)가 구현되므로, 루프 제어는 최종 성능을 좌우하는 중요한 설계상의 고려사항이다. 여기서는 구현된 솔루션에 대해 설명하고 측정된 주파수 응답과 이론적인 도출값을 비교 검증한다.
전기 스키매틱
고휘도 백색 LED의 아날로그 디밍은 색상 변화를 야기한다. PWM 디지털 디밍 제어는 색상 변화를 막기 위해 선호되는 디밍 방법인데, 이는 광도가 평균적인 루멘의 광도로 되기 때문이다. PWM 온 사이클 시의 LED 전류 진폭은 디밍 비율에 좌우되지 않는다.
그림 10은 자동차 애플리케이션용 LED 디밍 제어 시스템을 나타낸 것으로, 여기서 대기 전류가 비활성될 경우 10㎂ 미만이어야 한다. 이 시스템은 고정주파수 불연속 피크 전류 모드로 동작하는 NCV887300[1] ON Semiconductor 1MHz 비동기식 부스트 컨트롤러를 갖추고 있다. 그 부하는 10개의 직렬 연결된 Nichia NSSW157-AT[2] 고휘도 백색 LED로 이루어져 있다. 여기에 상응하는 보드는 그림 11과 같다.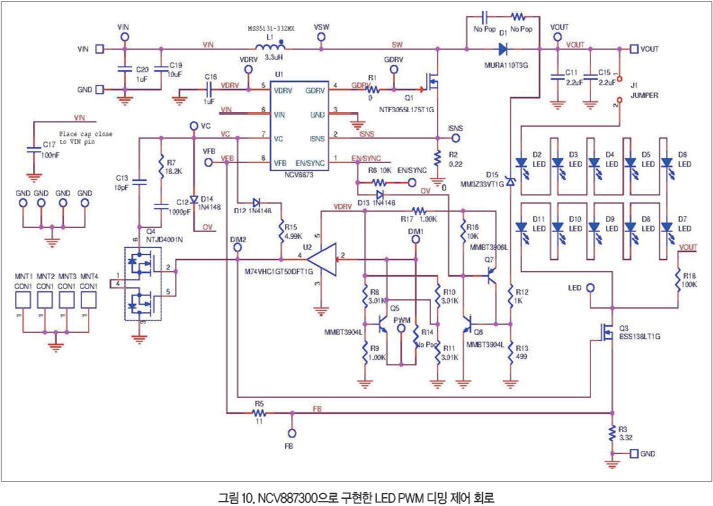
분석을 위한 NCV887300 컨트롤러의 주요 파라미터는 다음과 같다.
· VIN=13.2V일 때 대기 전류(Iq)<6㎂ (-40℃<TJ<125℃)
· EN/SYNC : 외부 TTL 활성화 명령에 대한 인터페이스를 용이하게 해준다. 핀은 오실레이터가 외부 클록에 동기화할 수 있도록 하는 이중 기능도 갖고 있다.
· ISNS : 부스트 트랜지스터의 전류 감지 레벨은 400mV이며, 내부 슬로프 보상은 130mV/㎲이다.
· VC : 내부 OTA(Operational Transconductance Amplifier) 보상 핀으로, 패키지 핀과 앰프 출력 사이에는 다이 레벨의 542Ω ESD 시리즈 보호 저항기가 위치해 있다. 전형적인 트랜스컨덕턴스 gm은 1.2mS이다. OTA는 100㎂의 싱크/소스 기능을 갖고 있다.
· VFB : LED 전류 감지 저항 R29는 200mV의 내부 레퍼런스를 기반으로 하여 크기가 조절된다.
이번에는 그림 10의 LED PWM 디밍 제어 회로에 대한 설계 목표와 동작 정보에 대해 살펴 본다.
설계 목표
이 회로는 입력전압 동작범위가 6~18V이고 PWM 레이트가 200Hz일 때 1000 : 1의 PWM 디밍 비율을 제공할 수 있다. 최소 펄스 폭은 약 5㎲이다. 1MHz의 NCV887300은 LED 전류를 위한 출력 콘덴서 전하를 유지하기 위해 최소 5개의 부스트 트랜지스터 게이트 펄스를 생성할 수 있다.
전압 조절을 유지하기 위해서는 불연속 전도 모드(DCM) 부스트 토폴로지가 필요하다. 그 이유는 부스트 인덕터 에너지 전체가 각각의 게이트 펄스 이후에 전달되기 때문이다. 연속 전도 모드(CCM) 토폴로지는 적당하지 않은 전압 조절 기능과 바람직하지 못한 아날로그 디밍을 야기하는데, 이는 여러 동작 사이클을 필요로 하는 부스트 인덕터의 에너지 축적 관성 때문이다.
딥 디밍(Deep Dimming) 동작 시 출력 콘덴서 전하를 유지할 수 있도록 돕기 위해서는 출력전류 누설 손실을 최소화해야 한다.
누설 전류는 LED의 PWM 비작동 시간에 어느 정도의 출력전압이 방전되도록 하는데, 이는 PWM 작동 시간이 재개될 때 일부 아날로그 디밍 및 보상 회로망이 상당한 오류를 겪게 되는 결과를 가져온다.
· 쇼트키 정류기는 온도에 따른 누설 전류가 상당히 크다. 부스트 정류기 누설 전류를 최소화하기 위해 초고속 기술의 부스트 정류기가 선택되었다.
· 세라믹 콘덴서는 전해 콘덴서보다 누설 전류가 훨씬 적으므로 출력 부스트 콘덴서로 선호된다.
· 출력 과전압 모니터링 회로의 전류 소모는 최소한도로 유지해야만 한다. 접지에 대한 저항 분배기 회로망을 이용하는 모니터링 회로는 적합하지 않다. 제너 작동 과전압 감지 회로를 선택한 것은 제너 문턱 전압이 배터리 전압보다 훨씬 더 높고 누설 전류가 극히 낮기 때문이다.
동작 관련 정보
Q18은 PWM 디지털 디밍 제어 장치를 위한 디지털 전류 흐름을 중단시킨다. PWM 명령이 ‘액티브 로우(Active Low)’상태일 때 D34는 IC VFB 피드백 제어 전압을 컨트롤러 조절점 이하의 값으로 클램핑시키고 부스터 IC GDRV FET 게이트 구동 신호를 중단시킨다. Q15는 딥 디밍 애플리케이션들을 위한 보상 회로망 상태 샘플/홀드 기능 역할을 담당한다. PWM 디밍 시 보상 회로망의 연결을 끊음으로써 피드백 보상 콘덴서 전하(C31 및 C32)가 유지되며, PWM 명령이 액티브 하이 상태로 되면 신속한 동적 제어가 재개된다.
Q14는 R48/R49/R51/R52와 함께 1.8V 로직 PWM 디밍 신호의 레벨 변화에 사용된다. U7은 양방향 스위치 Q15를 구동하기 위한 PWM 신호를 버퍼링한다.
오픈 LED 고장이 발생했을 때 이를 감지하지 않은 채 방치하면 과전압 동작 상태가 야기된다. 전류 감지 저항 R29의 전압 피드백은 0V로 되며, 그 결과 개회로 출력 과전압 상태가 된다. 과전압 보호 기능을 구현하기 위해 디스크릿 수동 부품들이 선택됐는데, 이는 LED 시스템의 작동이 외부에서 중지될 경우 출력 누설전류 손실을 최소화하기 위해서이다. D31 제너 다이오드의 도통으로 과전압 상태를 감지하면 인에이블 핀을 로우 상태로 만들어 부스트 전압 스위칭 동작(D28)을 중단시킴으로써 컨트롤러 IC를 소프트스타트시킨다. 저항 R30은 출력 부스트 에너지 저장 콘덴서 C22를 위한 방전 경로를 제공한다.
점퍼 J1을 제거하면 LED 체인의 동작이 해제되어 외부 부하를 단자 VOUT과 단자 LED 사이에 연결시킬 수 있게 된다.
저항 R44는 단자 VFB와 FB 양단의 주파수 응답 분석기를 위한 주입 지점이다. 이것은 시스템의 루프 응답에 영향을 미치지 않는다. 주파수 응답 분석기의 신호를 R44 양단에 주입함으로써 제어 출력(FB/VC 단자), 앰프(VC/VFB) 및 폐회로 형태의 개회로 이득(FB/VFB) 응답들을 측정할 수 있다.
LED AC 동적 저항의 특성 분석
LED 동적 저항의 경우 특정한 동작 조건에서 측정된 제조업체 데이터시트에 나와 있는 특성 분석 곡선에서 근사값을 구할 수 있다. 특정 시스템의 열 동작 조건은 많이 다를 수 있다. 앞에 나온 ‘이론적 분석’ 부분에서는 LED의 동적 저항을 측정하는 시스템 수준의 방법에 대해 설명했는데, 이 때 시스템 수준의 열 조건에서 소자가 갖는 특성을 분석했다. 여기서는 주파수 응답 분석기를 사용하여 PWM 듀티비가 100%일 때 열적으로 안정된 동작 조건에서 회로 내 전류감지 저항, PWM FET 저항 및 누적 직렬 동적 저항을 측정했다(그림 12).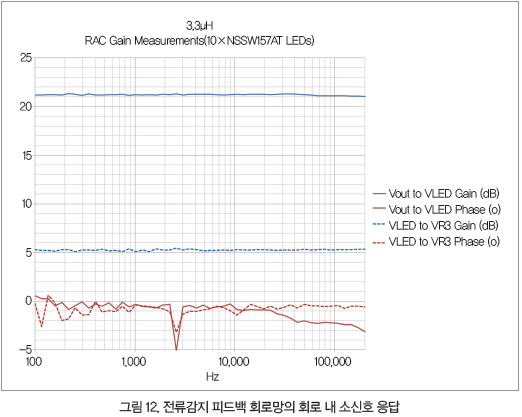
폐회로 분석
제어 출력(Vout) 수식 H(s)는 ‘이론적 분석’ 부분에서 도출되었다. 전력은 LED 스트링으로 전달되지만 피드백 제어의 피드백 항은 LED 전류 감지 저항 전압 VRsense의 항이다(그림 13). 따라서 플랜트 전달함수는 식 (41)과 같이 스케일을 조정해야 한다.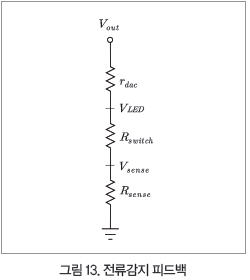
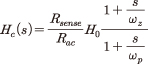 (41)
(41)
여기서, 다음과 같이 된다.
 (42)
(42)
 (43)
(43)
 (44)
(44)
 (45)
(45)
 (46)
(46)
 (47)
(47)
Vc는 식 (48)에서 구할 수 있다.
 (48)
(48)
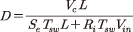
LED 동적저항, 직렬 PWM 트랜지스터 및 전류감지 저항 파라미터들은 열적으로 안정된 시스템 수준의 동작 조건에서 측정됐다. VIN=12V, Iout=116mA는 동작 파라미터들이었다. 측정된 개회로 응답 Hc(s)는 그림 14의 측정 결과들과 함께 선도를 그려낸다. 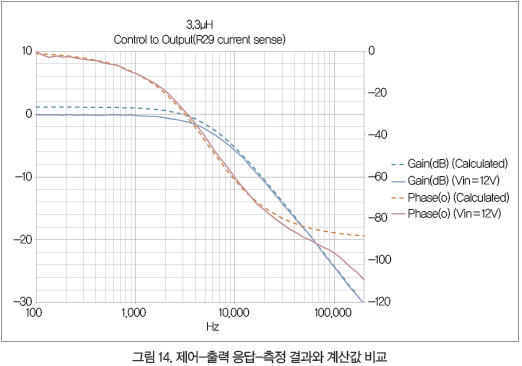
표 1은 그림 10의 스키매틱을 위한 계산에 사용된 측정 파라미터의 목록이다.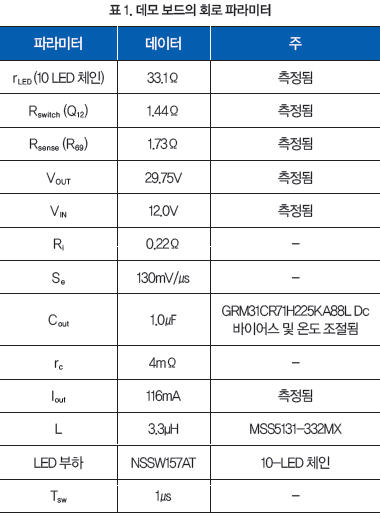
이론적인 위상 측정값과 실증적인 위상 측정값 사이의 차이는 고주파에서 분명해진다. 이러한 불일치는 식 (41)의 변조기 전달함수 분자에 RHPZ 항이 없기 때문인데, 이는 식 (44)에서 단순화된 계산 도출값이 갖는 한계로 설명됐다.
낮은 주파수 이득의 이론적인 결과와 측정된 결과들 사이에 작은 차이(약 1dB)가 나타나는 것을 볼 수 있다. 부스트 인덕터, 트랜지스터 및 정류기의 동작 손실들은 dc 동작점의 도출에서 무시되었다. 그와 같은 손실을 고려하면 듀티비 dc 동작점이 다소 커져서 저주파 이득의 감소를 가져올 것이다.
이는 식 (42)의 Vin(저항성 손실을 에뮬레이트하기 위해 감소된) 및 Vout (부스트 다이오드 전압강하를 포함하기 위해 증가된) 항을 수정하면 가능하다.
시스템 성능
그림 10의 LED 디밍 회로를 위한 1000 : 1의 200Hz PWM 디밍 동작 파형은 그림 15와 같다. VC 파형상에 약간의 보상 콘덴서 전압 방전이 있는데, 이는 Q9 양방향 스위치 응답 시간과 D19을 통한 PWM 클램프 활성화 사이의 경합 상태로부터 야기된다. R29는 보상 회로망의 전하 감소를 제한하기 위해 클램프 다이오드 D19과 함께 도입된다. 파형 VFB는 요구되는 디지털 파형과 진폭을 유지한다(아날로그 디밍 없음).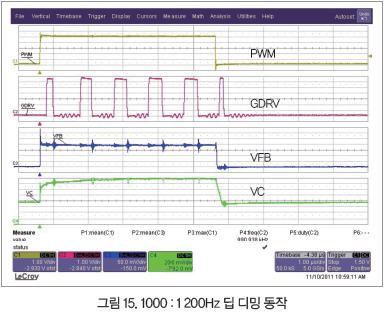
PWM 신호 명령이 ‘로우(low)’ 상태로 된 후 발생하는, 지속 시간이 극히 짧은 GDRV 파형(6번째 펄스)은 NCV887300 내부 로직의 전파지연 응답 시간에 의한 결과이다. 이 추가 펄스로부터 나오는 에너지는 딥 PWM 디밍 동작 모드에서 일부 기생 누설 에너지 손실을 보상해 주므로 출력 부스트 콘덴서의 전하를 유지하는 데 도움이 된다.
‘이론적 분석’ 부분에서 설명한 LED 스트링을 구동하는 DCM 부스트 컨버터의 이론적인 소신호 응답 수식이 LED PWM 디밍 회로의 분석에 성공적으로 적용되었다. 이를 통해 200Hz 1000 : 1 딥 디밍 능력에 대한 실제적인 측면을 살펴보았다. 시뮬레이션 및 측정 결과는 이론적인 수식에서 빠진 RHP 제로로 인해 고주파에 나타나는 위상 오류의 경우를 제외하고는 상관 관계가 있는 것으로 밝혀졌다. 1000 : 1 200Hz PWM 동작에서의 동작 파형들은 매우 양호한 동작 성능을 보여주었다.
참고 문헌
[1] ON Semiconductor NCV887300 Automotive Grade Non-Synchronous Boost Controller Datasheet, www.onsemi.com/PowerSolutions/product.do?id=NCV8873.
[2] Nichia Corporation NSSW157AT White LED Datasheet, http://www.nichia.co.jp/en/product/led.html#.
[3] C. Basso, ‘Switch Mode Power Supplies: SPICE Simulations and Practical Designs’, McGraw-Hill 2008, ISBN 978-0-07-150859-9.
[4] C. Basso, A. Laprade, ‘Simplified Analysis of a DCM Boost Converter Driving an LED String, Part I: Theoretical Analysis’.
Christophe Basso, Alain Laprade 온세미컨덕터








































