[헬로티]
전자 요금 징수 시스템(이하, ETC 시스템 : Electronic Toll Collection system)은 유료 도로의 입출입 게이트에 설치되어 있으며, 요금소에서 멈추지 않고 통행료를 지불하는 시스템이다. 그 구조는 ETC 차재기를 탑재한 차량이 진입하면 DSRC(Dedicated Short Range Communications) 통신에서 차량 정보와 입구 요금소, 출구 요금소, 통행요금 등의 정산에 필요한 정보를 교환해 과금한다.
특히 트럭 등 운송 차량의 고속 자동차도의 요금 구분은 보통차․중형차․대형차․특대형차로 구분되어 있으며, 차재기 등록 정보가 중형차인 경우, 축수가 1개씩 늘어날 때마다 대형차, 특대형차로 등급이 올라가는 구조이기 때문에 특히 중형차에서 특대형차를 분류하기 위해서는 차축을 판정할 필요가 있다.
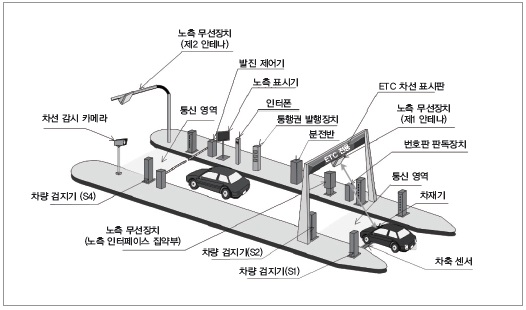

그림 1. ETC 레인 구성 예
그 중에는 적재물을 탑재하지 않은 경우에는 차축을 10cm 정도 띄워 타이어의 마모를 경감하는 동시에 과금액을 낮추는 리프트 액슬 차량도 존재한다. 이러한 정보를 그림 1에 나타낸 바와 같이 입퇴실 게이트 차량 통과 레인 노측대에 설치되어 있는 차량 검지 센서에 의해 위치 정보를 관리하고, DSRC 통신에 의한 차량 정보의 취득과 번호판 카메라, 차축 센서에 의한 차축 수 보정에 의해 요금소 통과 시의 요금 구분을 적정화하고 있다.
기존의 차량 검지 센서는 여러 개의 발광 다이오드로 구성되어 있는 투광부와 여러 개의 포토다이오드로 구성되어 있는 수광부를 쌍으로 노측대 양쪽에 설치하고 있으며, 차광 상태가 되면 차량을 검지하는 투수형 센서이다. 그렇기 때문에 센서 앞을 사람이 횡단한 경우나 이물질이 통과한 경우에도 차광 상태로 차량이 검지되어, 레인 내의 차량 관리 이상이 되는 과제가 있다. 한편, 차축 검지는 압전 센서에 의해 차량 검지 내를 통과한 차축 수를 측정하고 있지만, 차량의 통행에 따른 마모에 의해 짧은 사이클의 교환이 필요하며 이 교환을 위해 장시간 레인을 폐쇄하는 등의 과제가 있다. 이러한 과제를 해결하기 위해 필자 등은 고속 차량 측정에 적합한 레이저 거리 측정 센서를 검토해 레이저식 차량․차축 검지장치를 개발했다. 이 글에서는 그 장치 개요와 특징에 대해 설명한다.
TOF 센서의 원리
레이저광을 이용한 몇 m 오더의 거리 측정법으로는 액티브 스테레오법, 광비행 시간 측정법(이하 TOF : Time-of-Flight)이 알려져 있다. 전자는 Kinect를 대표하듯이 광원으로부터 투영된 패턴을 검지하고, 그 시차 정보로부터 거리를 산출하는 방식이다. 강도 패턴의 검출은 대상물의 반사율 변화와 태양광 등 외란광의 영향을 받기 쉽다는 과제가 있으며, 주로 실내에서 사용하는 경우가 많다. 후자는 빛의 조사 시간과 수광 시간의 시간차로부터 거리를 측정하는 방식으로, 최근 개발이 활발히 이루어지고 있는 차재 라이더나 기존 측량용에 적용되고 있던 레이저 거리 측정계와 같은 펄스광을 주고받는 펄스 방식 TOF와 변조 신호의 위상차로부터 측정하는 위상차 방식 TOF가 있다. 이들 방식은 대상물의 반사광을 시간 영역에서 해석하기 때문에 외란광의 영향을 잘 받지 않는다는 특징이 있다.
더욱 자세히 특징을 설명하면, 펄스 방식 TOF는 피크 출력이 높은 펄스 광원을 이용하므로 원거리용 측정에 적합하며, 펄스 반복 주기로 거리 측정 다이내믹 레이지가 제한되고 그 거리 측정 정밀도는 펄스광의 상승 시간에 의존, 일반적으로 몇 cm 정도이다. 한편 위상차 방식 TOF는 정현파 등으로 강도 변조된 연속파 광원을 이용하고 있으며, 변조 주기로 거리 측정 다이내믹스 레이지가 제한되고 그 거리 측정 정밀도는 위상 검출 정밀도에 의존, 몇 mm로 측정이 가능하다.
차량․차축 검지 용도에서는 앞에서 말했듯이 트럭에 적재물이 없을 때의 차축 리프트를 검지할 필요가 있기 때문에 거리 측정 정밀도가 높은 위상차 방식으로 검토를 했다.
수신 스캔이 없는 위상차 방식 TOF 센서의 구성
센서는 레인 노측대에 설치하는 것을 전제로 한다. 따라서 ETC 레인 내에서는 차량 자체가 동일한 방향으로 진행하는 것을 이용, 노면 진행 방향에 대해 수직 방향의 1차원 방향으로만 빔을 주사하는 구성을 검토했다.
시속 100km로 통과하는 차량을 빔 주사 속도 100Hz의 센서로 촬영한 경우, 직경 약 500mm 타이어는 1라인에서만 촬영할 수 있다. 즉, 본 용도에 대해서는 kHz 오더로 고속으로 빔 주사해 대상물을 고시간․고공간 분해능으로 측정할 필요가 있다. 이 주사 특성을 만족시키는 광학계로는 폴리곤 미러나 MEMS(Micro Electro Mechanical Systems) 미러를 적응할 수 있는데, 전자는 대구경화가 가능하지만 진동 등 옥외 용도의 신뢰성에 대해 과제가 있고, 후자는 소구경이지만 신뢰성은 높은 특징을 가지고 있다. MEMS 미러의 유효 개구는 최대라도 몇 mm이며, 송수신 동축 광학계를 전제로 한 경우에는 작고 수신 광량이 제한되어 측정 가능 거리가 늘지 않는 등의 문제가 생기게 된다. 그래서 송수신 광축을 독립시키고, MEMS 미러는 송신 빔만을 주사해 광시야이면서 대구경의 주사하지 않는 수신계를 실현함으로써 MEMS 미러를 이용한 장치 구성으로 수신 광량을 늘리는 연구를 실시했다.
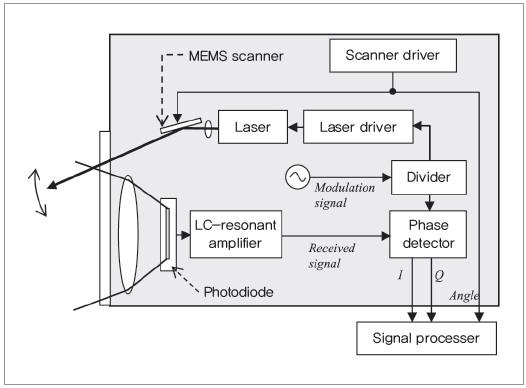
그림 2. 수신 스캔이 없는 라인 주사형 위상차 방식 TOF 센서의 구성
그림 2에 개발한 수신 스캔이 없는 라인 주사형 위상차 방식 TOF 센서의 구성을 나타냈다. 광시야․대구경의 수신광학계를 실현하는 키 디바이스로서 송신 빔의 주사 방향에 대한 수광 영역이 긴 형태의 수광 소자를 개발했다. 또한 수광 면적 확대에 따른 주파수 응답 열화에 대응하기 위해 강도 변조광의 변조 주파수를 그 응답 대역 내로 하고, 위상 검파부에서 고속 샘플링함으로써 빔 주사 속도 1ms/line, 샘플링 주파수 500kHz와 이동체의 촬영에 적합한 고밀도 데이터를 고속으로 취득하는 센서를 실현했다.
이 센서에서 거리 측정값 L(m)은 변조 주파수 fm(Hz), 위상차 Δφ(rad), 레이저광의 속도를 c(m/s)로 하면 이하에서 구할 수 있다.

이 센서의 변조 주파수는 10MHz로 하고, 위상이 360도 회전할 때의 거리(최대 측정 거리)는 15m이다. 또한 이 때의 거리 측정값의 표준편차 ΔL(m)은 수신 신호의 신호대 잡음비를 SNR로 하면, 이하에서 산출할 수 있다.

수신 신호의 신호 성분은 송신 파워나 대상물의 반사율, 수신 개구, 수신 감도로 결정되고, 아이세이프 조건과 촬영 범위 등에서 제한되는 파라미터이다. 잡음 성분은 수광 소자 내부의 단자 간 용량에 기인하는 앰프 잡음으로 제한되며, 일반적으로는 수신 면적이 크면 앞에서 말한 용량이 커져 앰프 잡음이 증가한다. 이 센서는 단일 변조 주파수만을 사용하는 것을 이용해 단자 간 용량과 동조하는 인덕터를 추가함으로써 수신 신호의 주파수대 근방에만 임피던스를 높게 해 잡음을 억제하는 연구를 했다.
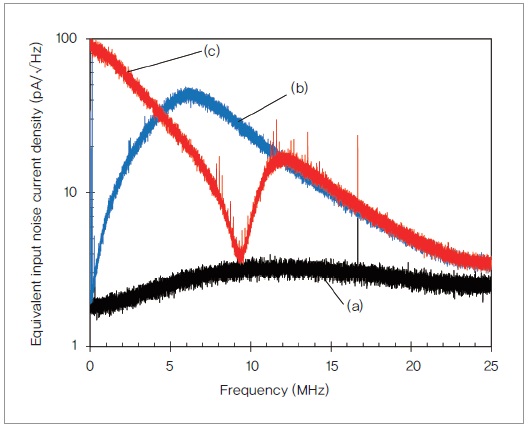
그림 3. 앰프 잡음 스펙트럼 (출처 : 문헌 ‘레이저 연구’와 ‘Optical Engineering(journal)’)
그림 3에 앰프의 잡음 스펙트럼을 나타냈다. (a)는 앰프 단체의 잡음 스펙트럼이며, (b)는 긴 형태의 수광 소자와 앰프를 접속했을 때의 잡음 스펙트럼, (c)는 10MHz 주변의 주파수로 동조시킨 경우의 잡음 스펙트럼이다. 주파수 10MHz 근방의 잡음 수준에 관해, 긴 형태의 수광 소자를 앰프에 접속한 경우는 앰프 단체의 잡음 레벨에 비해 15dB 정도 상승하지만, 긴 형태의 수광 소자를 동조형 앰프에 접속한 경우는 앰프 단체와 비교해 잡음 수준의 상승은 1dB 정도로, 동조 유무에 따른 잡음 억제 효과를 확인할 수 있다.
또한 센서에 직접 또는 간접적으로 태양광이 입사한 경우에는 태양광의 신호는 연속적인 DC 성분이기 때문에 변조 성분을 갖는 신호 성분과 전기적인 주파수 영역에서 분리할 수 있고 외란광 영향을 받지 않는다.
차량․차축 검지에 대한 응용
1. ETC용 차량․차축 검지 센서에 적용한 예
개발한 센서를 기존 ETC 게이트에 설치, 주행 차량의 촬영 실험․검지율 평가 실험을 했다. 우선 센서 구성에 대해 설명한다. 그림 4에 레인 상의 센서 설치 구성을 나타냈다. 차량 검지 센서는 주행 레인의 좌우 노측대 상부에 설치하고, 각각 차량 진행 방향으로 몇 십 cm 시프트하고 있다. 각각의 센서에서 차량을 검지하고, 검지 시간차로부터 차속도 산출하고 있다. 차축 검지 센서는 주행 레인의 한쪽 노측대의 하부에 설치해 차량 검지 중인 노면 설치 차축 수를 카운트한다.
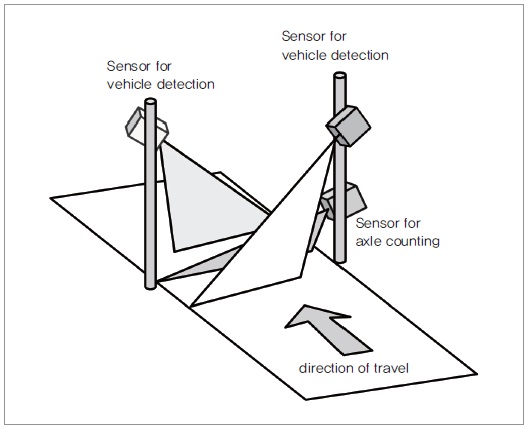
그림 4. ETC 레인 상의 차량․차축 센서의 설치 예
차속 40km/h로 주행하고 있는 차량의 촬영 결과를 그림 5에 나타냈다. (a)는 강도 이미지, (b)는 거리 측정값과 빔 주사 각도 정보로부터 3차원 좌표로 변환, 높이 정보에 대해 색칠한 높이 이미지, (c)는 각 주사 라인의 검지 데이터 수, (d)는 검지 트리거이다. 센서 처리 부분에서는 원하는 표준편차의 거리 측정값이 되도록 소정의 강도값에 대해 임계치를 설정하고, 유효 데이터만을 처리하고 있다. 또한 그 유효 데이터 수가 소정 수 이상 있는 경우, 차량 검지로 판단하고 있다.
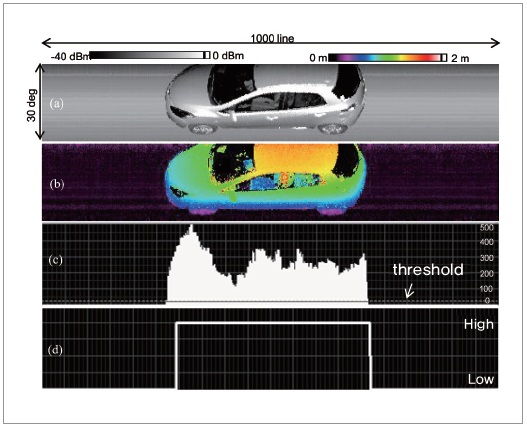
그림 5. 차량 검지 센서의 취득 이미지 (출처 : 문헌 ‘Optical Engineering(journal)’)
그림 6에 차축 센서로 취득한 차속 30km/h의 리프트 액슬 트레일러차의 촬영 결과를 나타냈다. 각각 차량 검지 이미지와 마찬가지로 (a)는 강도 이미지, (b)는 거리 측정값과 빔 주사 각도 정보로부터 3차원 좌표로 변환, 높이 정보에 대해 색칠한 높이 이미지, (c)는 각 주사 라인의 검지 데이터 수, (d)는 검지 트리거이다. 차축 검지에 대해서는 차량 검지로 기재 한 처리에 더해, 높이 히스토그램 등을 부가함으로써 리프트 액슬을 판별하고 있다.
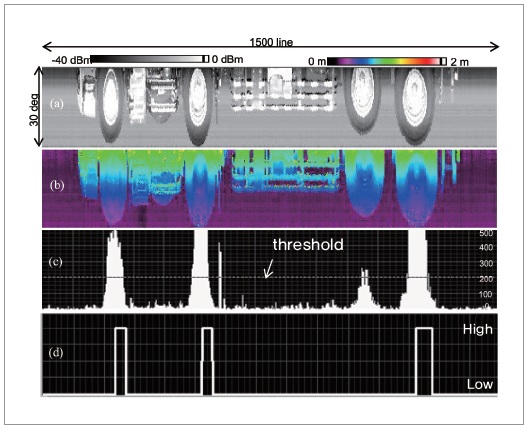
그림 6. 차축 검지 센서의 취득 이미지 (출처 : 문헌 ‘Optical Engineering(journal)’)
다음으로 기재한 검지 알고리즘을 적용해 실제 필드에서 차량 검지와 차축 검지의 검지율에 대한 평가 시험 결과에 관해 설명한다. 평가 기간은 2012년 6월 12일부터 7월 2일까지 21일간 실시하고, 그 때의 기후 조건은 쾌청, 흐림, 강우, 차량 대수는 약 3만대였다. 특히 6월 19일은 태풍의 접근에 의해 강우량 약 50mm/hr의 강한 비가 내린 날이었다. 평가 결과, 이륜차와 사륜차, 소형차, 보통차, 대형차, 리프트 액슬차, 흰색 차량과 검은색 차량 등 차종이나 차색에 대한 차이와 앞에서 말한 기후 조건, 밤낮의 영향이 없으며, 차량 검지 100%, 차축 검지 99.99%라는 결과를 얻을 수 있었다. 차축 검지에서 오검지가 된 차량은 타이어의 외측이 커버 등으로 덮여 있어 타이어 하부밖에 보이지 않는 것이었다.
2. 치수 위반 차량 검지 센서에 적용한 예
도로를 통행하는 차량은 차량 제한령으로 정해져 있는 중량과 차폭, 차고, 차장 이하일 필요가 있다. 이 제한은 대형 차량이 통행할 때, 노면과 교량의 열화나 커브의 벽면과 터널 내의 천장, 조명 등 도로 부속 시설의 접촉 시에 손상을 방지하는 도로 보전을 목적으로 한다. 그러나 실제로는 규정 위반 차량이 무허가로 다수 주행하고 있으며, 만일의 사고 발생 시에는 도로의 통행금지로 인한 교통 체증과 보행자가 개입된 중대한 사고로 이어지기 쉽기 때문에 위반 차량의 단속을 실시하고 있다.
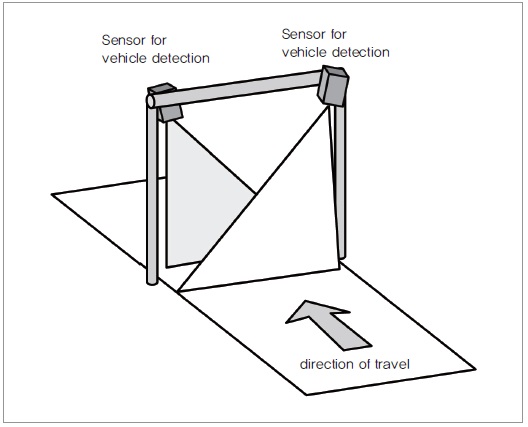
그림 7. 치수 위반 차량 검지용 설치 예
그림 7에 고속도로 게이트에 설치한 예를 나타냈다. 높이 6m의 갠트리(주행 레인에 걸쳐 있는 지주) 상에 설치하고, 차량의 양측에서 주행 차량을 측정한다. 차폭과 차고는 센서의 거리 측정값과 설치 간격을 기초로 측정하고, 2개의 센서를 차량 진행 방향에 대해 어긋나게 설치함으로써 검지 시간차로부터 차속을 측정하고, 차량 검지 시간으로부터 차장을 추정한다.
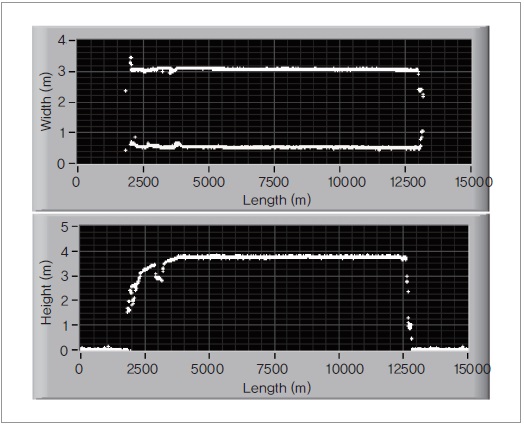
그림 8. 차폭․차고 측정의 예 (출처 : 문헌 ‘레이저 연구’)
그림 8에 대형차에 대한 차장․차폭․차고의 측정 결과를 나타냈다. 3차원 변환 후의 점군 데이터에 대해 강우와 적설 등의 이산적인 데이터를 클러터로서 제거한 후, 2개 센서의 거리 측정값을 융합한 것이다. 위의 그림은 점군 데이터의 각 센서의 폭 방향 최근값을 플롯한 것으로, 이 점군의 최대 간격을 차폭으로서 산출한다. 아래의 그림은 높이 방향의 최대값을 플롯한 것으로, 이 점군의 최대값을 차고로서 산출한다.
쾌청이나 강우, 강설 등의 환경 조건 하의 게이트 테스트 필드에서 크기 측정 평가를 실시했다. 주행 차량으로는 차폭 2490mm, 차고 3780mm, 차장 11980mm의 대형차를 이용했다.
차속과 주행 패턴을 바꾼 55회의 측정 결과, 차폭, 차고, 차장에 대한 평균값이 각각 2537.3mm, 3856.6mm, 11777.4mm, 표준편차가 60.3mm, 15.3mm, 188.9mm라는 결과를 얻을 수 있었다. 차량 치수와의 차이는 47.3mm, 76.5mm, 202.6mm이고, 차폭 정확도, 차고 정확도 모두 ±10cm, 차장 정확도는 길이의 10% 이내로 측정할 수 있다는 것을 확인했다.
맺음말
이 글에서는 동사가 개발한 위상차 방식 TOF 센서에 관한 개요와 차량․차축 검지 센서에 대한 응용 예에 대해 소개했다. 개발한 센서는 ①긴 형태의 수광 소자에 의해 광시야이면서 고정 수신 시야를 가지고 있으며, ②그 가운데를 전송 빔만 MEMS 미러로 고속으로 주사시키는 구성으로 하고, ③LC 동조 앰프의 동조 주파수에 맞춘 변조 주파수를 이용해 위상차 방식에 의한 거리 측정을 고속 샘플링함으로써 고속 이동하는 차량에 대해서도 고시간․고공간 분해능으로 촬영할 수 있는 것이 특징이다.
이 장치를 적용한 예로서, ETC 레인용 차량․차축 검지 센서에 대한 적용과 치수 위반 차량 검지 센서에 대한 적용을 소개했다. ETC 레인에 대한 적용은 차량 검지 센서 2개와 차축 검지 센서 1개의 3개를 사용, 취득한 반사 강도․거리 데이터로부터 차량 검지와 차축 수 검지를 하는 것이다. ETC 레인에서 평가 시험을 한 결과, 모든 기후 조건에서 차량 검지 100%, 차축 검지 99.99%를 실증할 수 있었다.
또한 치수 규정 위반 차량 검지 센서에 대한 적용은 차량 검지 센서 2개를 레인 상부에 설치하고, 차폭․차장․차고를 측정하는 것이다. 평가 결과, 차폭 정확도, 차고 정확도 모두 ±10cm, 차장 정확도는 길이의 10% 이내로 측정할 수 있다는 것을 확인했다.
일본 국내의 초고속 인프라 동향으로서는 게이트가 없는 ETC와 프리 플로 ETC 등 시스템의 간소화를 검토하고 있다. 이번에 개발한 위상차 방식 TOF 센서를 앞에서 말한 시책에 적용할 수 있도록 앞으로도 검토해 갈 계획이다.
이마키 마사하루·요시나가 히데오·카메야마 슌페이, 미쓰비시전기주식회사