


[첨단 헬로티]
CW 위상 변위 비행거리측정센서
CW 위상–변이 기반의 장치는 소니세미컨덕터솔루션(일본 도쿄)의 최신 센서를 사용하여 텍사스인스트루먼트(Texas Instruments) 및 마이크로소프트(Microsoft)를 포함한 여러 회사에서 출시하고 있다. 이것은 SoftKinetics사(Gewest, 벨기에)가 처음 개발했으며 현재 소니의 소유로 되어 있다. SoftKinetics 기술은 고효율(그림10a)로 고속 샘플링이 가능한 전류보조 광자복조(CAPD, Current Assisted Photonics Demodulation) 픽셀 구조와 같은 특징을 가지고 있다. 이 비행거리측정센서(ToF) 픽셀기술은 소니의 이면조사센서(backside illuminated sensor) 기술과 결합하여 새로운 DepthSense® ToF 센서를 탄생시켰다.
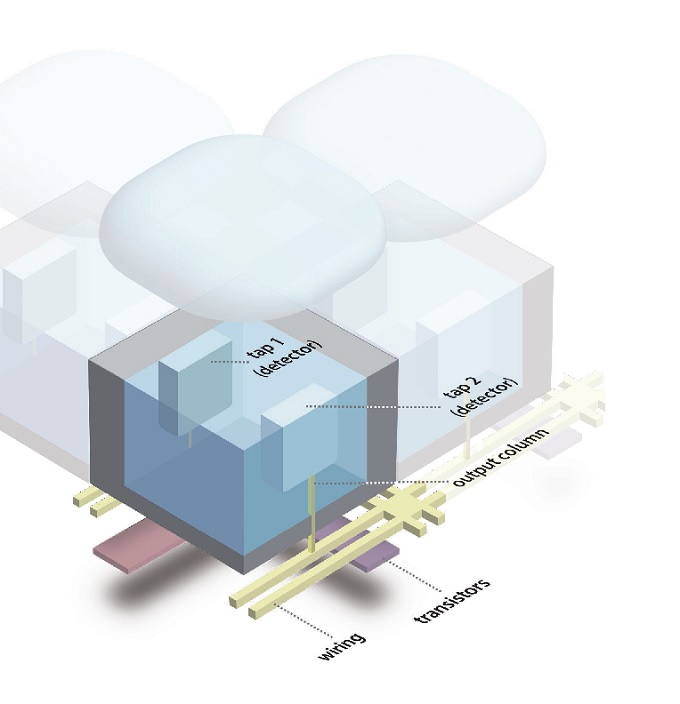

그림 10
이면조사센서(BSI) 기술은 근적외선(NIR) 파장에서 집광효율이 더 좋다(그림 10b). 새로운 소니 IMX556PLR은 640x480 해상도, 30fps에서 실행되는 10μm x 10μm 픽셀의 1/2 인치 센서이다. 현재 소니의 DepthSense 센서는 LUCID Vision Labs(Richmond, BC, Canada)의 헬리오스(Helios) ToF 3D 카메라에 사용되었다.
이 카메라는 여러 주파수로 변조된 4 개의 온보드 850nm VCSEL 레이저 다이오드의 빛을 사용하여 2개의 거리에서 작동할 수 있다(그림 11). 카메라의 시계는 59°x45°이며 작동 범위는 0.3~6m이다. 100MHz의 최고 변조 주파수에서 카메라는 0.3~1.5m 작동 범위에서 2.5mm 이상 정밀도와 5mm정확도를 제공한다.
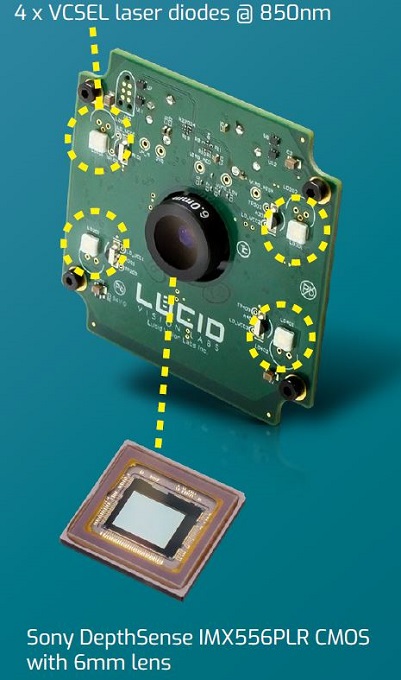
그림 11. Helios imager board
카메라는 칩 외부(off-chip)에서 계산할 필요없이 장치에서 직접 읽을 수 있는 3D 포인트 클라우드 데이터를 생성하는 온보드(on-board) 처리를 수행한다. 포인트 클라우드 데이터는 카메라의 GigE 인터페이스를 통해 전송할 수 있으며 LUCID의 아레나(Arena) 소프트웨어 개발킷 (SDK)을 사용하여 추가적으로 처리를 할 수 있어 사용자는 C, C++ 또는 C#에 있는 카메라와 인터페이싱하는 맞춤형 프로그램을 작성할 수 있다.
과거에는 카메라 공급업체가 고객에게 드라이버를 제공하여 호스트 컴퓨터에서 드라이버를 올바르게 구성하고 제어할 수 있도록 하였다. 머신비전 카메라용 범용 프로그래밍 인터페이스인 GenICam이 도입됨에 따라 카메라 인터페이스는 사용자의 API와 분리되어 여러 카메라 드라이버를 작성해야 할 필요성이 줄어 들었다. 이제는 GenICam 3.0이 출시되어 깊이 및 진폭 데이터 또는 처리된 포인트 클라우드 데이터를 추가로 변환하지 않고 카메라에서 읽을 수 있다. 헬리오스(Helios) 카메라는 GenICam과 호환되므로 현재 판매되고 있는 기성품 GenICam 소프트웨어 패키지와 매우 빠른 시일 내에 통합될 것이다.
환경 고려
어떠한 3D 이미징 기술도 모든 어플리케이션의 요구를 충족시킬 수 없다. 따라서 능동 또는 수동 이미징 시스템을 선택할 때 추가 광원이 있는지, 어떤 표면을 이미지화 할 것인지, 시계속의 물체가 정반사성(specular)인지, 다중반사를 하는지 등 몇 가지 요인을 고려해야 한다.
햇빛이나 정반사성광과 같은 광원은 스테레오 비전 시스템에 사용되는 카메라를 쉽게 포화시킬 수 있다. 반대로 빛이 적으면 노이즈가 많은 결과가 발생할 수 있다(그림 12). 광이 약한 환경에서는 약간 더 고가인 능동 스테레오 비전 방법을 사용하는 것이 좋다.
마이크론 수준의 정밀측정을 요하는 도량형과 같은 애플리케이션은 물체에 비교적 가깝게 위치할 수 있는 보다 고가의 능동 레이저 시스템을 필요로 하며 LIDAR 스캐닝과 같은 능동 레이저 시스템은 거리상으로는 훨씬 더 먼 곳을 계측할 수 있다 그러나 절대 정확도는 낮아진다. 창고 및 공장과 같은 거리 범위가 0.5~6m인 실내 환경의 경우 비행 거리 측정 센서(ToF) 기술은 다른 3D 기술로는 불가능했던 특정 광 및 물체의 질감(texture)문제를 극복할 수 있는 컴팩트 솔루션을 제공한다.

그림 12. 애플리케이션 환경마다 광원이 다양하여 다양한 광의 문제를 나타낸다. 3D 기술을 선택하기 전에 귀사의 애플리케이션의 광 및 물체의 재질을 이해하는 것이 중요하다. 이 창고의 예에서는, 3D 이미징은 다양한 광원으로 인해 여러 가지 면에서 영향을 받을 수 있다.
장기 혜택
LUCID의 헬리오스 (Helios) 카메라(그림 13)에 사용된 소니의 DepthSense 센서와 같은 비행거리측정센서(ToF) 기술은 3D 이미징시스템을 개발하는 사람들에게 새로운 기회를 제공한다.
첫째, 시스템이 단일 카메라만을 사용하기 때문에 개발자는 보정을 할 필요가 없다.
두 번째로, 이 시스템은 전통적인 수동 스테레오에 비해 역광 조건의 영향을 훨씬 덜 받는다. 셋째, 카메라는 포인트 클라우드 데이터(그림 14)를 직접 출력하여 호스트 PC에서 오프로드 처리를 한다. 마지막으로 이 시스템은 고성능 능동 레이저 시스템보다 비교적 저렴하나 성능은 프로젝션 레이저 광 스테레오 시스템과 맞먹는다.
6m의 거리와 약 5mm의 정확도를 지닌 LUCID의 헬리오스(Helios) 카메라는 다른 많은 애플리케이션에서 사용할 수 있다. 이러한 카메라는 이전에 스테레오 카메라를 사용하여 물체를 캡처한 시스템에서 사용할 수 있다. 3D물체탐지 애플리케이션에는 헬리오스(Helios) 카메라가 듀얼 헤드 스테레오 비전 시스템을 대체하는 로봇 픽 앤 플레이스(pick and place) 머신 등이 있으며, 이로 인해 시스템의 크기와 무게가 줄일 수 있게 되었다.
헬리오스(Helios) 비행 거리 측정 센서(ToF) 카메라는 헬리오스카메라에서 포인트 클라우드 데이터가 이미 계산되었으므로 물체를 인식하고 로칼라이즈하기 위해 PC에서 해야 하는 처리를 줄여주었다. 표면에 특징이 거의 없거나 전혀 없는 영역을 빛을 비추기 위해 이전에 패턴 프로젝터를 사용한 재료 검사와 같은 애플리케이션의 경우 ToF 기술이 근적외선(NIR) 광을 반사하는 물체만 필요하기 때문에 헬리오스(Helios) 카메라를 사용할 수 있었다. 그러나 이와 같은 매칭을 위한 질감을(texture) 필요로 하지 않는다.
3D이미징 기술은 산업 애플리케이션에서 계속해서 중요할 역할을 할 것이다. 목표까지의 거리, 정확도 및 정밀도, 환경에서 오는 광원 및 전체 비용 등의 애플리케이션의 요구사항에 맞는 다양한 3D기술이 다른 기술에 비해 성능이 우수하다. 실시간으로 물체를 감지해야 하는 애플리케이션의 경우 ToF기술은 3D 깊이 성능을 향상시키고 기존 스테레오 비전카메라 시스템에 비해 애플리케이션 복잡성을 단순화하였다.
소니의 DepthSense 센서가 탑재된 헬리오스(Helios) ToF카메라는 ToF기술의 정확성, 정밀성 및 속도를 향상시켜 애플리케이션 디자이너에게 새로운 3D 가능성을 제시하고 최종고객에게 지속적인 혜택을 제공한다.

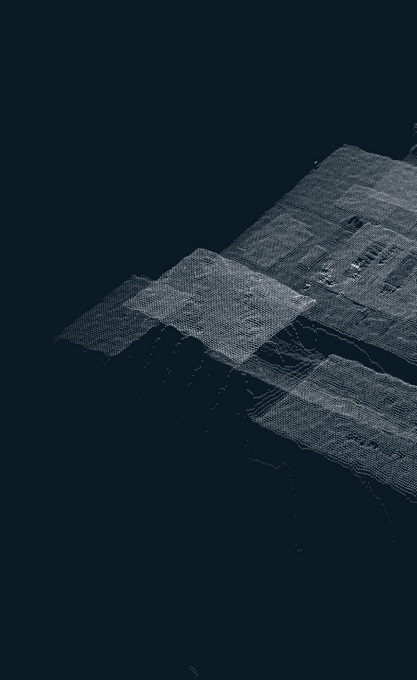
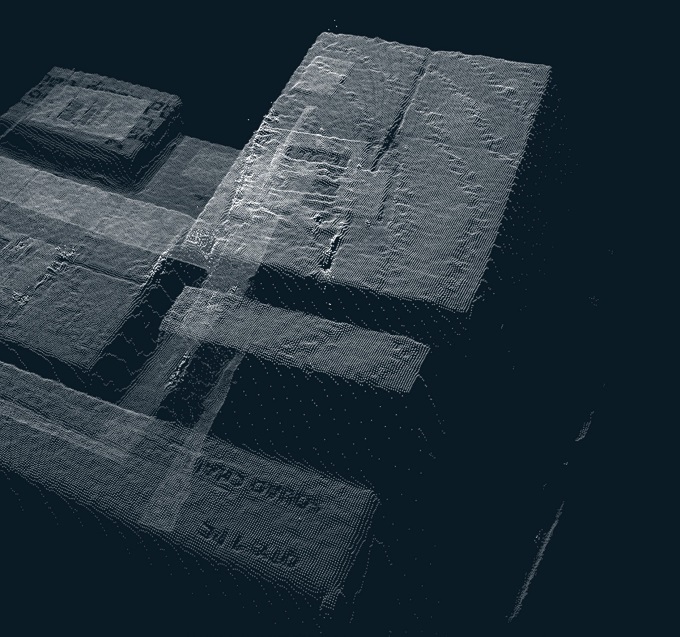
그림 13. Helios 카메라로 만든 포인트 클라우드
이미지포커스











































