[첨단 헬로티]
1. 개발 배경
최근 프레스 성형품의 고정도화·복잡형상화나 자동차 등에서 볼 수 있는 외관 디자인의 혁신이 진전하고 있으며, 금형가공에 대한 요구도 보다 고도화되고 있다. 특히 기계가공 후에 수작업으로 이루어지는 연마다듬질 공정의 단축을 위해 고면품위 가공에 대한 요구가 높아지고 있다.

고면품위 가공을 실현하기 위해서는 기계뿐만 아니라 축제어, 가공 환경 변화에 대한 대응, 가공 프로그램 등 여러 가지 요소의 레벨업이 중요해진다. 동사에서는 기계뿐만 아니라 모터나 드라이브 유닛, 검출기, 수치제어장치, 소프트웨어를 자사에서 개발하는 등, 여러 가지 분야의 기술을 개발해 자사제 CNC ‘OSP’에 실장, 기계 그리고 가공 기술과 일체가 되어 고정도·고면품위 가공에 대응해 왔다.
가공 형상을 미소한 점군으로 근사한 가공 프로그램을 이용하는 금형가공에 대해서는 1997년부터 미소한 직선 근사 지령으로부터 곡선을 인식해 매끄러운 속도 제어를 하는 형상 보정과 형상 적응 제어를 실장한 고속 가공 기능 ‘Super-NURBS(슈퍼 넙스)’를 제공, 고면품위 가공의 요구에 대응해 왔다. 여기에서는 고면품위화에 대한 요구에 대응하기 위해 에지부의 형상 정도를 유지하면서 곡면을 인식해 매끄럽게 가공하는 것을 추구해 새롭게 개발한, 가공 프로그램 보정 기술을 실장한 ‘Hyper-Surface(하이퍼 서피스)에 대해 소개한다. 또한 기본 성능을 강화해 기계의 경년변화에 적응하고 이송축을 최적으로 제어하는 최신 서보 제어 기술도 함께 소개한다.
2. 과제
금형가공에서는 3D CAD에 의해 디자인된 모델을 CAM에 의해 미소한 점군으로 근사한 가공 프로그램을 사용하는 케이스가 대부분이다. 기존 가공 결과에 줄무늬나 식입 등의 가공 불량이 발생, 이것이 가공 프로그램의 지령 위치 혼란에 기인하는 경우에는 CAM의 세팅을 변경해 가공 프로그램을 재출력하는 등으로 대응해 왔다.
그러나 최근 시장의 확대와 함께 가공 현장에서 가공 프로그램의 변경이 쉽지 않다. 또한 지급된 가공 프로그램 때문에 변경할 수 없는 케이스가 증가해 왔다. 이들을 해결하기 위해 가공 프로그램에 포함되는 지령 위치의 혼란을 수치제어장치에 의해 보정하는 것에 대한 요망이 높아지고 있다.
3. 금형의 고면품위 가공에 대한 대응
그림 1은 가공 면품위의 저하를 일으키는 요인과 그 해결 방법에 대해 가공 제어의 단계마다 나타낸 것이다. 앞에서 서술한 과제인 가공 프로그램의 지령 위치 혼란에 대해 ‘Hyper-Surface’를 개발, 가공패스의 진행 방향 지령 위치의 흔들림에 대응하는 ‘지령 위치 평활화 기능’, ‘이송 속도 평활화 기능’ 등 서로 인접하는 가공패스의 면직 방향 줄무늬나 면의 이음매 지령 위치의 불균일에 대응하는 ‘인접 패스 보정 기능’을 실현했다. 더구나 이송축의 제어 성능을 높이기 위해 서보 제어의 강화로서 새로운 서보 시스템 ‘MCS4’를 개발, 게인업에 의한 이송축 추종 지연의 억제, 위치 검출 분해능의 향상에 의한 매끄러운 이송의 실현, 기계 상태에 맞춘 최적의 서보 파라미터를 자동 설정하는 ‘서보 내비’를 개발했다.
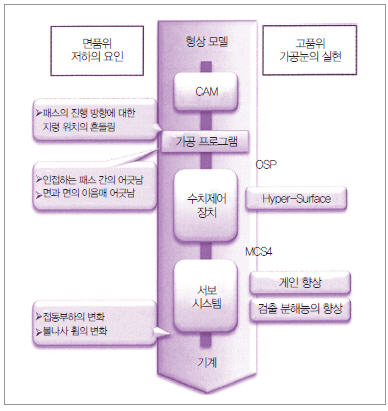
▲ 그림 1. 금형가공에서 과제와 새로운 기능
4. Hyper-Surface의 개요
(1) 지령 위치 평활화, 이송 속도 평활화
형상 모델의 매끄러운 곡면을 미소한 점군으로 근사한 경우, 가공 프로그램에 따라서는 지령 위치의 간격이 불균일하거나, 가공패스의 진행 방향에 대해 지령점의 위치가 국소적으로 흔들리고 있는 경우가 있다(그림 2).
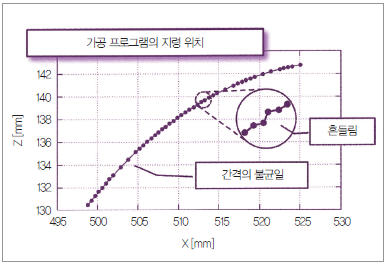
▲ 그림 2. 가공패스 상의 지령 위치 불균일
이와 같은 가공패스(가공 형상)에서 지령에 대해 충실하게 이송 속도를 제어해 축동작하면, 지령 위치의 연속성이 끓어지는 부분에서 가속도가 생기고 실제 이송 속도가 변동한다(그림 3). 그리고 이 이송 속도의 변동은 기계의 거동에 영향을 줘서 공구 날끝의 가공 워크에 대해 맞닿음이 변화한다. 특히 대형 금형을 가공하는 문형 머시닝센터에서는 이송 속도의 변동이 공구 날끝의 거동 변화에 미치는 영향은 커서, 가공 워크에 대한 ‘맞닿음’이 인접하는 가공패스 간에서 다르면 가공눈 폭의 차이가 되어 나타난다.
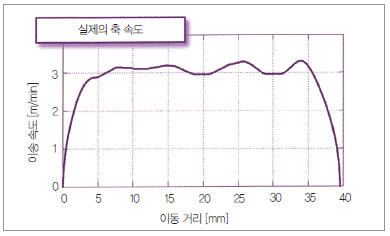
▲ 그림 3. 축의 이송 속도 변동
이번에 새롭게 개발한 ‘지령 위치 평활화’, ‘이송 속도 평활화’에서는 가공패스의 진행 방향에 대한 지령점의 흔들림을 매끄럽게 보정, 불필요한 속도 변동을 억제하는 동시에 평균적인 이송 속도의 향상을 실현했다(그림 4).
▲ 그림 4. 축의 이동 속도의 안정화
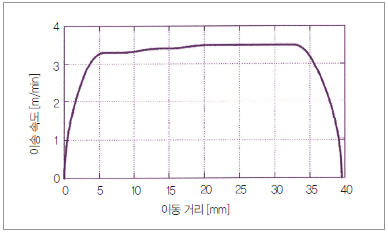
그림 5는 금형가공 시의 실제 축의 이송 속도를, 가공패스를 따라 색의 농담으로 표현한 것이다. 색이 진한 부분은 이송 속도가 높고, 옅은 부분은 낮은 것을 나타낸다. 평활화 ‘오프’ 시에는 몇 개의 가공패스에서 부분적으로 속도가 저하하고 있는 모습을 보이는데, 평활화 ‘온’에 의해 억제되고 주변과 동등한 높은 속도가 유지된다는 것을 확인할 수 있다.
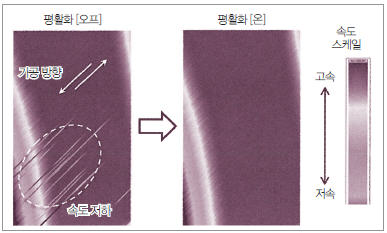
▲ 그림 5. 가공면에서 이송 속도의 분포
(2) 인접 패스 보정 - 줄무늬 보정
가공면에 나타나는 줄무늬 모양의 가공흔적은 인접하는 가공패스의 눈 폭 차이에 의해 확인할 수 있다. 그림 6에 나타냈듯이 이웃끼리 절입 깊이(커프스 하이트)가 균등하면 가공눈 폭 비율은 균일(5:5)해져 양호한 면품위가 된다.
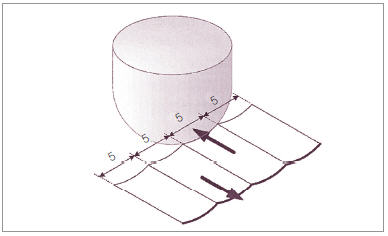
▲ 그림 6. 절입 깊이가 고른 가공눈 폭
CAM에 의해 미소한 점군으로 프로그램 출력하는 경우, 근사의 허용오차량(프로그램 톨러런스) 부여 방법에 따라서는 인접하는 가공패스의 지령점 간에 수직 방향으로 몇 μm의 어긋남이 발생하는 경우가 있다(그림 7).
▲ 그림 7. 면직 방향에 대한 어긋남
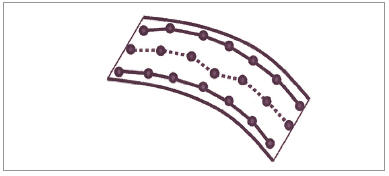
혹은 곡면에서 지령점 간격이 좁은 패스 옆에 간격이 넓은 패스가 있으면, 간격이 넓은 패스에서 지령점 간을 단락하는 경로가 되어(그림 8) 역시 절입 깊이에 차이가 생긴다.
▲ 그림 8. 지령점 간의 단략
이 상태에서 지령점에 충실한 축동작으로 가공을 하면, 인접하는 패스끼리 절입 깊이에 차이가 생겨 가공눈의 눈 폭이 불균일(7:3)하게 나타난다(그림 9). 줄무늬 보정에서는 이들 인접하는 가공패스 간의 면직 방향 줄무늬를 보정, 절입 깊이를 고르게 하고 줄무늬 모양의 가공흔적 발생을 억제한다. 그림 10에 줄무늬 보정의 효과를 나타냈다.
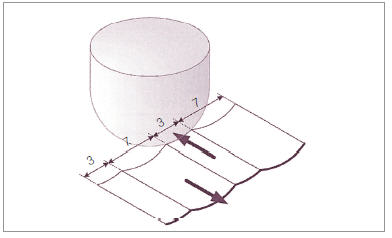
▲ 그림 9. 절입 깊이가 다른 가공눈 폭

▲ 그림 10. 줄무늬 보정의 효과
(3) 인접 패스 보정 - 에지 보정
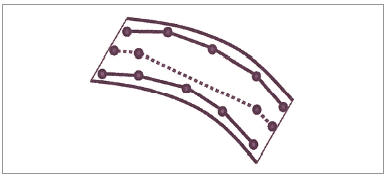
가공패스가 면과 면의 이음매(에지 라인)에 걸쳐 있을 때, 지령점이 에지의 근방에 있거나 떨어진 위치에 있는 등 지령점의 위치가 제각각 되어 있는 경우나, 또는 면을 왕복가공하는 패스에서 인접하는 가는 길과 오는 길의 패스 간에 지령점이 서로 다른 위치에 출력되는 경우 등 에지 라인 상에 지령점이 고르게 되어 있지 않은 경우가 있다(그림 11).
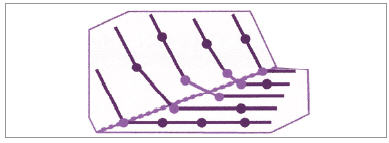
▲ 그림 11. 면의 이음매에서 지령점의 어긋남
이들 지령점에 기초해 가공하면 공구 날끝이 에지의 부근까지 절입하는 패스나, 에지에서 떨어진 위치를 통과하는 패스가 혼재해 식입이 되거나 돗자리 눈 모양의 가공흔적이 되어 나타난다(그림 12). 에지 보정에서는 이들 면의 이음매 부근의 지령점을 추출해 보정함으로써 강약이 있는 가공 결과를 얻을 수 있었다(그림 13).
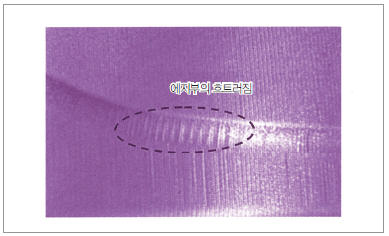
▲ 그림 12. 에지 보정 ‘오프’
▲ 그림 13. 에지 보정 ‘온’
5. 가공 면품위 향상을 실현하는 서보 시스템 ‘MCS4’
형상가공에서는 이송축의 가감속 시나 상한 반전 시에 지령에 대한 추종 지연이 생긴다. 추종 지연에 의해 공구의 궤적이 지령과 어긋나면, 인접하는 왕복 패스 간에 단차나 줄무늬가 생긴다. 또한 서보 제어에서 위치 검출 분해능이 낮으면, 속도 리플이 생겨 가공눈 폭이 흐트러진다. 이와 같이 지령에 대한 추종 지연이나 속도 리플은 가공 면품위가 저하하는 원인이 된다.
이송축의 추종 성능을 향상, 매끄러운 이송 동작을 실현함으로써 가공 면품위를 향상시키는 동사의 최신 서보 시스템 ‘MCS4’의 특징을 이하에 나타냈다.
(1) 피드백 제어계의 하이 게인화
기존의 서보 시스템에 대해 위치·속도·전류의 제어 주기를 더욱 고속화했다. 이것에 의해 기존의 서보 시스템에 대해 피드백 제어계의 위상특성을 향상시킴으로써 하이 게인화(=고감도화)를 실현, 이송축의 추종 지연을 억제했다.
(2) 위치 검출 분해능의 향상
이송축 구동용 모터에 내장하는 검출기의 성능 향상을 위해 M형 검출기를 개발했다. M형 검출기(그림 14)는 기존의 검출기에 대해 통신 주기를 고속화해 검출 분해능 40,000,000parts/rev를 실현했다. 이것에 의해 검출 분해능 기인의 속도 리플을 극한까지 억제함으로써 매끄러운 이송 동작이 가능해졌다.
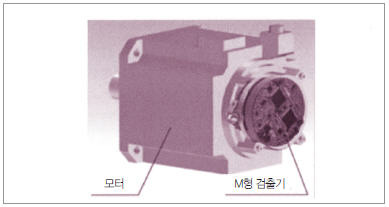
▲ 그림 14. M형 검출기
(3) ‘MCS4’의 효과
샘플 워크 곡면가공의 평가 결과를 그림 15에 나타냈다.
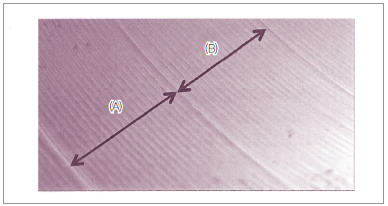
▲ 그림 15. MCS4의 효과
그림 중의 (A)부는 기존 서보 시스템의 가공 결과이고, (B)부는 ‘MCS4’의 가공 결과이다. (A)부에서는 가공눈 폭이 안정되어 있지 않은데, (B)부에서는 눈 폭이 안정되어 있으며, ‘MCS4’의 효과를 확인할 수 있다.
6. 가공 면품위를 유지하는 제어 기술
경년변화 등에 의해 기계의 상태가 변화하면, 서보의 제어 파라미터가 기계 상태와 언매치가 되어 추종 성능이 열화하는 경우가 있다. 동사의 서보 시스템 ‘MCS4’의 서보 제어 기본 성능 향상 외에도 상한 반전이나 고가감속 시의 추종 지연을 억제하는 보상 기술에 의해 이송축의 추종 성능을 향상하고 있다. 그 가운데서도 기계 상태에 맞춘 최적의 서보 파라미터를 설정, 가공 면품위의 장기 유지를 실현하는 제어 기술 ‘서보 내비 SF(Surface Fine tuning)’에 대해 이하에 소개한다.
(1) 기능 구성
‘OSP’에 탑재한 ‘서보 내비 SF’는 ‘반전 돌기 자동 조정 기능’, ‘제진 자동 조정 기능’, ‘휨 자동 조정 기능’의 3가지 기능에 의해 구성된다.
각 기능은 ‘OSP’의 서보 내비 화면(그림 16)으로부터 선택해 기동할 수 있다.
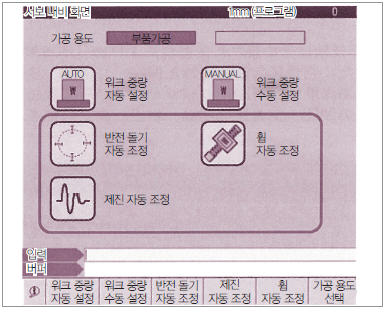
▲ 그림 16. 서보 내비 화면
① 반전 돌기 자동 조정 기능
이송축의 반전 동작 전의 접동부하나 반전 시의 가속도에 대응해, 보상 파라미터를 자동 조정하는 기능이다. 조정용으로 미리 준비한 축동작을 함으로써 이동 방향이 반전하는 경우의 추종 지연(=반전 돌기량)으로 접동 부하값을 추정, 서보의 제어 파라미터를 최적의 값으로 조정한다. 이 기능에 의해 이송축의 이동 방향 반전부에 생기는 줄무늬를 억제하는 것이 가능해진다.
② 제진 자동 조정 기능
경년변화에 의해 커진 로스트 모션에 의해 발생하는 이송축의 진동을 자동 조정하는 기능이다. 이송축의 진동을 자동 조종하는 기능이다.
앞에서와 동일하게 조정용으로 미리 준비한 축동작에 의해 진동주파수를 특정, 서보의 제어 파라미터를 최적의 값으로 조정한다.
③ 휨 자동 조정 기능
볼나사 구동하는 이송축에서는 고가감속 시에 서보나사가 신축함으로써 지령에 대한 공구 끝단 궤적에 오차가 발생, 왕복 패스에서 가공눈 폭이 고르지 않게 된다. 이 기능은 기계강성이나 워크 중량 변화에 의존하는 가감속 시의 볼나사 신축량(=휨량)을 추정, 보상함으로써 가공눈 폭을 고르게 할 수 있다.
또한 경년변화에 의해 기계강성이 변화해 휨량이 변화한 경우에는 이 기능에 의해 자동 조정함으로써 이송축의 추종 성능을 최적화할 수 있다.
오쿠다 카즈히로 (奧田 和博) & 사카이 타케시 (酒井 健史)
오쿠마(주) 소프트웨어기술부 MC소프트기술부 과장 & FA개발부 서보제어개발과
본 기사는 일본 일본공업출판이 발행하는 「기계와 공구」지와의 저작권 협정에 의거하여 제공받은 자료입니다.