



BLDC 모터는 안정적인 속도 제어용 시스템과 소형·고토크를 요구하는 장비에 사용됐다.
최근 들어 장비의 사이즈가 더 작아지고 저비용에 대한 수요가 증가 하면서 이에 대응할 수 있는 제품이 필요하게 되었다. 이런 요구를 반영하여 오리엔탈모터는 더 작은 사이즈, 더 낮은 소비전력,
사용의 편리성을 추가하여 차세대 BLDC 모터를 개발했다.
기본적인 BLDC 모터의 특징과 차세대 BLDC 모터인 BMU 시리즈(일명 : NexBL)의 기술적 특징을 소개한다.
브러실리스 모터(BRUSHLESS MOTOR)는 소형, 고효율, 고출력 모터로서 다양한 장치나 기기의 구동원으로 사용되고 있다.
최근 장치의 소형화, 고출력화, 에너지 절약화의 요구와 함께 모터에도 비슷한 성능이 추가되길 기대하는 한편, 쉽게 설치·접속·조작할 수 있길 바라는 기대감도 커지고 있다.
이러한 요구에 부응하기 위해 소형화·경량화·고효율화를 실현한 NexBL 모터와 사용의 편의성을 향상시킨 드라이버를 조합한 제품이 NexBL BMU 시리즈이다(그림 1참조).

그림 1. NexBL BMU 시리즈

여기에서는 BLDC 모터의 기본적인 특징과 함께 NexBL 모터의 소형화, 경량화, 고효율화를 실현한 기술을 중심으로 설명한다.

그림 2. NexBL BMU 시리즈 특징
BLDC만의 특징
1. 안정된 속도 제어
브러실리스 모터는 설정 속도와 모터로부터의 속도 피드백 신호를 항상 비교하면서 모터로의 인가전압을 조정한다. 따라서 부하가 변해도 저속에서 고속까지 안정된 속도로 회전한다.
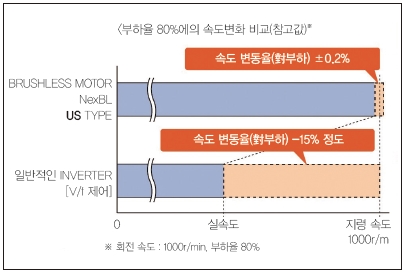
그림 3. BLDC와 인버터의 속도 안정성 비교
인버터 제어(V/f 제어)의 삼상 인덕션 모터(Induction Motor)에서는 피드백 제어를 하지 않기 때문에 부하가 커지면 속도가 크게 저하된다. 속도의 안정성을 중시하는 용도에는 브러실리스 모터를 권장한다.

그림 4. BLDC와 인버터의 속도 제어 범위 비교
2. 폭넓은 속도 제어
브러실리스 모터는 AC 속도 제어 모터나 인버터보다 광범위한 속도 제어가 가능하다. AC 속도 제어 모터처럼 저속에서의 사용 토크가 제한되지 않기 때문에 저속에서 고속까지 일정 토크를 필요로 하는 용도에는 브러실리스 모터가 적합하다.
3. 소형 고토크
브러실리스 모터는 로터(Rotor)부에 영구자석을 사용해 소형이지만 High Power를 자랑한다. 예를 들면 설치치수 90mm의 삼상 인덕션 모터와 비교할 경우, 전체 길이가 84mm 짧아지며 출력은 1.3배가 된다. 브러실리스 모터는 장비의 Down Sizing에도 공헌한다.
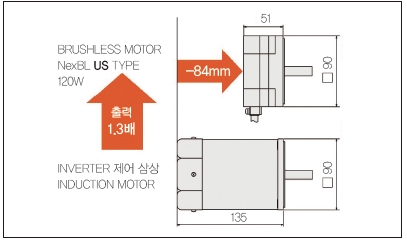
그림 5. BLDC 모터와 AC 모터의 사이즈 비교
4. 에너지 절약 공헌
브러실리스 모터는 로터부에 영구자석을 채용하고, 로터의 2차 손실을 방지한다. 따라서 인버터 제어의 삼상 인덕션 모터와 비교한 결과 소비전력을 약 23% 절약, 장비의 에너지 절약에 공헌한다.
특히 최근에는 세계적으로 에너지 규제가 강화되고 있기 때문에 장비에 고효율 모터를 적용하는 것이 필요하다.
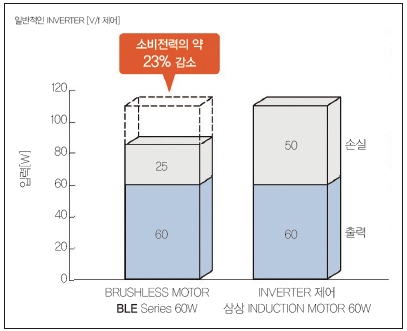
그림 6. BLDC와 인버터의 소비전력 비교
NexBL 모터의 소형·경량·고효율화 기술
모터의 손실은 그림 7과 같이 전자 강판에서 발생하는 것과 철손, 코일에서 발생하는 구리 손실, 기계적 마찰 등에 의한 기계 손실로 나누어진다.
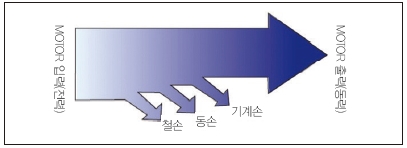
그림 7. 브러실리스 모터의 에너지 흐름
고효율화를 달성하기 위해서는 이 손실을 얼마나 줄일 수 있는지가 포인트가 된다. 여기에서는 NexBL 모터에서 실시한 손실 저감 설계를 설명한다.
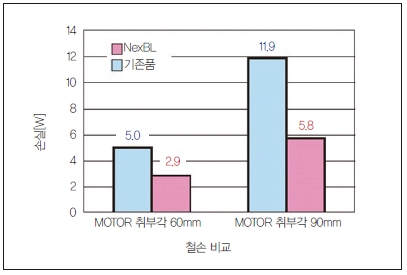
그림 8. 철손 비교
1. 철손 저감
소형·고출력 실현을 위해 자속 밀도가 높은 네오디뮴 소결 자석을 채용하여 철손이 증가하고 있다. 이어 rare earth(희토류의 원소)의 자원 절약을 위해 디스프로슘(희토류 원소)을 자속 밀도를 높이는 데 사용하고 있다.
위의 이유로 자속 밀도의 증가에 대해 전자 강판의 재질이나 두께, 형상을 최적의 형태로 설계 하고 있다.
철손은 자기 히스테리시스 손실과 와전류 손실에 따라 크기가 변화한다. 와전류 손실은 전자 강판 1매의 두께 t의 제곱에 비례하는 것으로 나타난다. NexBL 모터에서는 전자 강판 1장의 두께를 0.35mm로 기존 제품의 0.5mm보다 얇은 것을 사용함으로써 와전류 손실을 저감하고 있다. 철손은 전자 강판 적층체인 철심 질량(m)에 비례하므로, 질량을 저감하여 철손의 절감을 실현했다.
자석과 스테이터의 최적 설계에 따라 철심의 두께를 약 절반으로 만들 수 있으며, 경량화와 철손 저감으로 소형화를 동시에 실현했다.
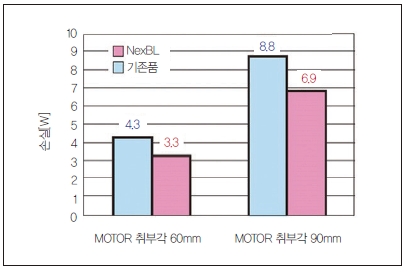
그림 9. 동손 비교
2. 동손 저감
전류값과 같으면 동손은 권선 저항값에서 결정된다. 동손을 줄이려면 굵은 코일을 감는 것이 포인트이다. 또한, 사용하는 자석의 자속 밀도가 높아지기 때문에 전자 강판의 폭을 넓힐 필요가 있다. 이러한 부분을 고려하여 최적화된 설계를 했고 이 결과, 단면적 S가 커져 권선을 사용할 수 있는 구조가 되어 동손을 저감했다. 또한, 철심의 깊이가 반으로 줄어들고 권선 길이가 짧아져 동손의 저감을 실현했다.
철손과 동손을 감소시켜 국제 규격의 효율 등급(1)인 IE4의 수치를 크게 웃돌고 있는 에너지 효율 결과를 얻게 되었다.
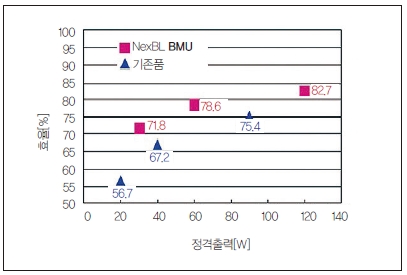
그림 10. UNIT 효율 비교
3. 기어 헤드가 달린 제품의 기계 손실 저감
최근 감속기와 조합되는 모터에서는 톱니바퀴의 물림 소리를 낮추기 위해 헬리컬 톱니바퀴를 채용하는 사례가 늘어나고 있다. 평치차 톱니바퀴를 사용하면 치차의 마찰 때문에 기어 헤드 내부의 그리스(grease)를 긁어내어 그 그리스가 모터 내부에 침투하는 일이 있다. 이를 방지하기 위해 모터 출력축 부분에 오일 씰을 설치하고 있지만, 유동성이 높은 그리스에서는 고성능 타입의 오일 씰을 사용하는 것보다 밀봉력을 높이는 것이 필요하다(그림 11 참조).
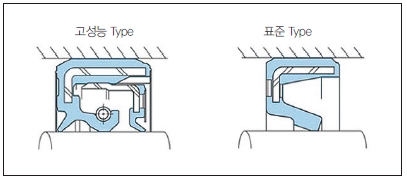
그림 11. 오일 씰 단면도
한편, 밀봉력을 세밀히 할수록 오일 씰의 부하가 커져 모터의 효율이 낮아진다. 또 오일 씰 자체도 커지게 되어, 결과적으로 모터도 커진다. NexBL 모터에서는 이러한 문제를 해결하고자 표준형의 씰과 조합해 그리스를 확실히 밀봉하는 간단한 구조의 기구를 개발했다(특허 출원 중). 이 기구에 사용하는 부품을 그리스 씰 튜브라고 부른다. 그림 12은 그리스 씰 튜브와 그리스 씰 튜브를 모터 출력축에 장착한 예이다.
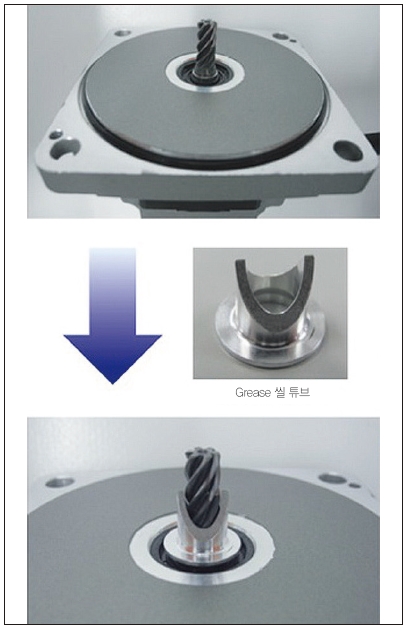
그림 12. 그리스 씰 튜브를 장착한 상태
기존 제품은 표준형의 오일 씰만으로 그리스의 침입을 막는 구조이다. 이 구조에서는 유동성이 높은 그리스의 누출을 완전히 막는 것이 어려웠다.
NexBL 모터에서는 그리스 씰 튜브를 장착함으로써 오일 씰에 이르기 전의 단계에서 그리스 대부분을 되돌리는 구조로 되어 있다. 이에 따라 그리스가 모터에 침입하는 것을 막아 준다.
모터의 회전부 뒤에 기어 헤드를 제외하면 그림 13처럼 모터 쪽에 그리스가 침입하지 않는 것으로 나타난다.
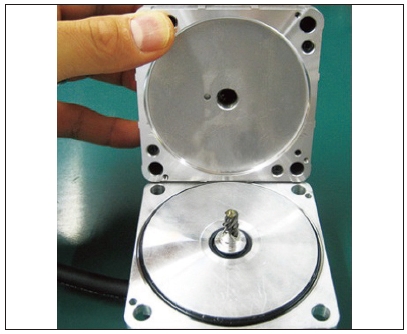
그림 13. 그리스 씰 튜브의 효과
그리스 씰 튜브를 추가하여 오일 씰에 의한 부하의 증가를 억제함으로써 모터부의 소형, 고효율을 실현했다.
BMU 드라이버의 특징
1. 조작성 향상
BMU 시리즈는 사용 편리성에 적합한 제품이다. 그 때문에, 기능뿐 아니라 조작 측면에도 사용 용이성을 구현했다. 앞쪽 패널은 감각적으로 움직이는 디자인이며 STAND BY- RUN스위치 방향이나 데이터 설정 다이얼의 형상 등을 업그레이드 했다.
다이얼의 가운데 움푹한 부분을 손가락으로 돌릴 경우, 장갑을 낀 상태에서도 돌릴 수 있게 했다. 이에 따라 다이얼 바깥쪽을 잡고 손끝으로 돌려도 다이얼을 조작할 수 있다(그림 14 참조)

그림 14. 다이얼을 사용한 속도 설정
또 속도 설정의 다이얼은 기존에는 아날로그 볼륨이었지만, 엔코더를 채용해 디지털로 1r/min씩 설정할 수 있다. 아날로그 볼륨은 다이얼을 잘못 건드렸을 때 속도가 달라질 수 있다. 하지만 BMU 시리즈에서는 다이얼 조작의 잠금 기능을 설치하여 의도하지 않는 속도의 변경이나 데이터의 변경을 방지할 수 있다.
2. 디지털 표시기
디지털 표시기로 회전 속도와 부하율, 알람, 경고 상태를 모니터 할 수 있다. 알람이나 경고는 코드가 표시되므로 그 종류가 어떤 내용인지 쉽게 알 수 있다.
회전 속도 표시에서는 기어 헤드 출력축의 속도 표시나 컨베이어에 이송 속도를 표시 할 수 있다. 아래는 컨베이어에 이송 속도를 표시 할 경우 파라미터 산출식이다.
파라미터 산출식 = 1/모터 1회전당 이동량
= 기어헤드 감속비/풀리직경×원주율
산출된 파라미터 설정 값에서 컨베이어의 이송 속도는 다음과 같이 환산된다.
컨베이어 이송 속도 = 모터 출력축의 회전 속도/파라미터 설정값
다음은 계산의 예이다.
예) 풀리 직경 : 0.1m, 기어헤드 감속비 : 20인 경우
파라미터 설정 값 = 20/0.1Xπ ≒ 63.7
위의 결과로부터, 파라미터 설정 값이 63.7이 되기 때문에 감속비 파라미터에서 63.7을 설정한다.
컨베이어 운전 속도 = 1300/63.7 = 20.4[m/min]
표시부에는 ‘20.4’라고 표시된다.
3. 활용도를 향상시키는 새로운 기능
BMU 시리즈에서는 사용의 편의성을 향상시키기 위해 신기능을 추가했다.
1) 과부하 알람 검출 시간 연장
기존 제품의 과부하 검출 시간은 5초로 되어있다. 하지만 사양 외의 부하가 많아져도 알람이 검출되지 않게 검출 시간을 연장시키고 싶다는 요구가 많았다. 이에 따라, 파워 소자의 방열 구조를 재검토하여 과부하 알람 검출 시간 연장이 가능해졌다.
2) 속도의 상한 값·하한 값 설정
속도 제어 범위는 80r/min에서 4000r/min이고, 장치의 사양에 따라 속도 제어 범위의 상한 값, 하한 값을 설정할 수 있다. 조작 실수 방지 등에 사용할 수 있다(그림 15 참조).
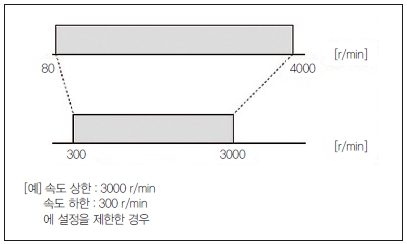
그림 15. 속도의 상한 값·하한 값 설정
3) 간이 유지 기능
모터 정지 중에 모터 출력축의 변화에 따라 정격 토크 약 50%의 보유 토크가 발생해 임의의 위치에서 간이적으로 유지 할 수 있다.
모터 정지 중에 외력에 의한 모터 출력축에 변화가 생기면 홀 신호가 바뀌어 속도 정보를 얻을 수 있다. 검출한 속도 정보를 바탕으로 속도 지령과의 차이를 감지하고 속도를 0r/min으로 하기 위해 전압 지령이 적분기로부터 출력된 원래의 정지 위치로 돌리려는 토크를 발생한다.
위치 제어와 달리 완전히 원래의 위치로 되돌릴 수는 없다. 모터 출력축이 ±60°의 각도 변위 안에서 부하를 간이적으로 유지하려는 용도로 사용할 수 있다.
제품 소개
NexBL BMU 시리즈의 출력은 30W·60W·120W의 3종류, 전원 전압 사양은 단상 100V 타입, 단상 200V/삼상 200V 타입의 2종류가 있다. 둥근 샤프트 타입 외에 평행 축 기어 헤드와 콤비 타입으로 된 제품도 준비되어 있다(표 1, 표 2 참조).
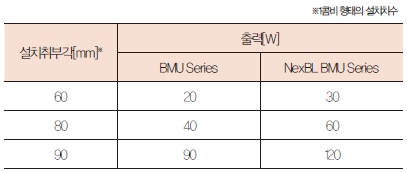
표 1. NexBL BMU 시리즈 출력
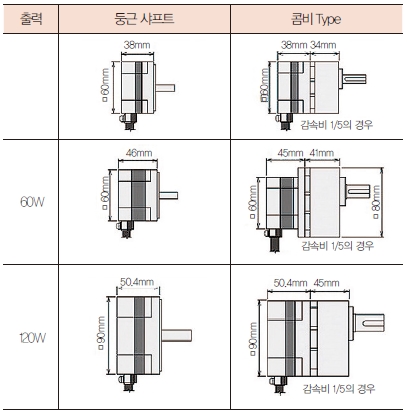
표 2. NexBL 모터 외관
맺음말
모터, 드라이버의 모든 설계와 디자인을 새롭게 바꾼 NexBL BMU 시리즈는 향후 브러실리스 모터를 담당하게 될 제품이다. 고객의 기구부 전체의 소형화, 경량화에 공헌할 수 있고 또한 고효율이기 때문에 장비의 에너지절약에 기여할 수 있다. 또한, 이 제품에 사용된 신기술을 인정받아 2013년 초 ‘제조 부품 대상 기계 부품 상’도 수상했다.
앞으로 NexBL BMU 시리즈의 LINE UP을 확대해 나갈 계획이다. 또한, NexBL 모터와 조합하는 새로운 드라이버를 개발해 상품 LINE UP을 진행할 예정이다.
*문의 : TEL : 080-777-2042(代)
인아오리엔탈모터 기술연구소











































