



CAN 대역폭 확대에 따른 자동차 문제 해결
자동차에 탑재되는 전자 요소가 기하급수적으로 증가하고 있다. 다시 말해 안전, 편의, 파워트레인, 인포테인먼트,
조명 등 주요 분야에서 성능 및 기능이 상당히 발전해 왔다는 의미다. 일부 업계 전문가들은 2019년까지 재래식
(내연 기관) 차량 비용의 최대 50%와 하이브리드 차량 비용의 80%가 차량 탑재 전자 시스템에서 발생할
것이라고 예측했다.
Lance Williams, Jan Polfliet ON Semiconductor
자동차에 점점 복잡한 전자 제어 장치(ECU)가 장착되면서 반도체 부품이 더 많이 사용되고 있으며 이에 따라 각종 개별 기기, 모듈 및 서브 시스템의 효과적인 상호 교신 능력이 중요한 관심사가 되고 있다.
이와 같이 혹독한 운용 환경으로 인해 모든 것이 더욱 까다로워지고 있다. 여기서는 날로 심화되는 자동차 관련 고속 데이터 네트워킹 기술의 필요성과 설계 엔지니어들의 기술적 난제를 자세히 살펴본다.
견고한 비동기 작동 계측 제어기 통신망(CAN) 버스 또는 로컬 상호 접속망(LIN) 등의 기타 통신 프로토콜을 사용하는 차량 탑재 네트워크는 데이터를 고속으로 전송할 수 있는 필수 네트워크를 제공하는 데 안성맞춤이었다. 그러나 자동차 전자 시스템의 볼륨과 복잡성이 커짐에 따라, 기존 네트워킹 프로토콜의 운영 한계가 드러나기 시작했다. 따라서 최신 기능의 트랜시버를 사용한 넓은 대역폭의 네트워크 기술을 활용해야 할 필요성이 대두되었다.
최근 새로 부각되고 있는 대표적인 차세대 자동차 네트워킹 프로토콜로 CAN Flexible Datarate(CAN FD)를 들 수 있다. 듀얼 비트 데이터 레이트 구성에 의존하는 이 프로토콜은 자동차 제조사들에게 최신 모델에서 확연히 늘어난 대역폭을 사용하게 한다. 이 프로토콜은 이전의 CAN과 유사한 기초 아키텍처를 기반으로 하므로 비교적 실행이 용이하다고 할 수 있다.
그러나 전송 능력이 높아짐에 따라, 데이터 위상의 비트 레이트 증가 및 이에 따른 더 많은 데이터 용량(예전의 8바이트가 아닌 64바이트)을 더욱 빠른 속도로 전송할 수 있게 한다. 또한 CAN FD는 마이그레이션 경로가 단순하므로, 현재 고려되고 있는 다른 고속 자동차 네트워킹 프로토콜에 비해 노드당 비용이 상대적으로 낮다.
비트 레이트가 초당 1Mbit를 초과하는 첨단 CAN 트랜시버를 활용하면 CAN FD를 실행할 수 있다. 그러나 자동차 애플리케이션 설정에서 발견되는 다양한 피해 원인으로부터 트랜시버를 보호하는 방법을 찾아야 한다는 문제도 있다.
CAN 노드 내 보호 메커니즘
 CAN 트랜시버는 여러 가지 외부 구성요소를 활용하여 다음 요인에 의한 작동 문제를 처리하는 경우가 많을 것이다.
CAN 트랜시버는 여러 가지 외부 구성요소를 활용하여 다음 요인에 의한 작동 문제를 처리하는 경우가 많을 것이다.
•차량 내 기타 시스템의 작동을 방해할 수 있는 전자기 방출(EME)
•CAN 네트워크를 통과하는 데이터의 신호 무결성에 영향을 미쳐 통신 문제를 일으킬 수 있는 전자기 간섭(EMI)
•반도체 소자를 파손시킬 수 있는 정전기 방전(ESD)
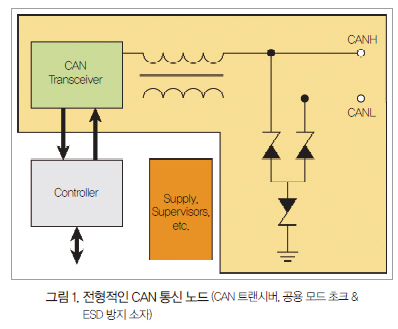
이러한 외부 구성요소를 포함시키면 높은 신뢰도로 연결성을 유지할 수 있다. 그 결과 CAN 통신 노드는 CAN 트랜시버, (EME 및 EMI 방지를 위한) 공용 모드 초크, 그리고
(일반적으로 과도 전압 억제 장치 형태를 띤) ESD 보호 장치로 구성되며, 대부분 그림 1에 나타난 도식과 비슷해 보인다.
이 설정 내에서, 기타 외부 부품의 정전 용량과 함께 초크의 누설 인덕턴스는 공명을 발생시킴으로써 특정 상황에서 비트 오류율을 높이고 네트워크의 신호 지연을 유발시킬 수 있다. 이것은 이미 표준 CAN 실행과 관련하여 문제가 됐지만, CAN FD가 등장하면서 문제의 심각성이 가중되었다.
그뿐 아니라 외부 ESD 보호 장치 사용에 의해 비롯되는 다른 문제들도 감안해야 한다. 이 문제들은 트랜시버 자체와 일체화되는 내부 ESD 보호 메커니즘 및 그 효과와 상호 작용할 수 있으므로, 훼손 가능성이 있다. 따라서 특정 트랜시버와 수반되는 외부 보호 소자를 선택하면 여러 모로 복잡해진다.
이러한 소자를 포함시킬 경우 더 많은 PCB 자산이 소모될 것이 분명할 뿐 아니라(높은 열 관리 수준이 요구될 것이다), 그와 관련된 자재비가 늘어나며 개발 시간도 길어질 것이다. 따라서 각 노드에서 필요한 부품 수를 줄이기 위해 노력해야 한다.
보다 발전된 고집적 반도체 기술을 이용하면, 외부 ESD 보호 소자가 없는 특정한 경우에도 오직 하나의 트랜시버 IC로만 이루어진 CAN 프런트엔드 통신 노드를 실행할 수 있을 것이다. 이렇게 되면 전반적인 비용 축소 측면에서 유리할 뿐 아니라, 공명 효과에서 비롯된 신호 대 잡음 문제를 처리함으로써 통신 인프라의 운용 성능을 높이는 데에도 도움이 될 것이다.
현재 대부분의 자동차 CAN 네트워크에는 20∼30 노드가 있다. 일부 럭셔리 모델의 네트워크에서는 50∼100 노드도 발견할 수 있으며, 몇 년 후에는 중급 모델에도 이 정도 수치가 채용될 가능성이 높다. 이러한 점을 고려하면 중량 감소 효과도 볼 수 있을 것으로 판단된다.
CAN FD 트랜시버 제품은 이미 시장에 도입되었고, 이 프로토콜을 보급하는 데 도움이 되기 시작했다. CAN FD 트랜시버와 CAN 컨트롤러가 하나의 칩에 탑재된 소자만으로도 더욱 치밀한 고집적화가 가능해질 것이다. 그리고 시스템 마이크로 컨트롤러를 통해 CAN 컨트롤러 기능을 관리할 필요가 없어지므로, 기존 자동차 설계에 반영하는 것이 훨씬 수월해질 것이다. 그러면 CAN FD 지원을 위해 기존의 마이크로 컨트롤러를 변경하지 않고도 ECU를 재설계할 수 있다.
앞에서 살펴본 바와 같이, 자동차 제조사들이 직면한 여러 가지 차량 내 통신 관련 기술적 과제들을 충족시킬 수 있는 정교한 네트워킹 소자들이 계속해서 등장하고 있다. 앞으로 차세대 자동차 설계에 있어서는 차량 탑재 네트워크의 견고함을 확보하는 한편, 보다 높은 데이터 전송률을 달성하는 일이 핵심 과제로 될 것이다.







































